1) adjustment example, 2) preparation, 3) operating procedure – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 232
7 Utility Functions (Fn
)
7-14
7.8
Offset Adjustment of Analog Monitor Output (Fn00C)
If connecting an analog monitor unit, the analog monitor signal output (factory setting: torque monitor or
motor speed monitor) can be monitored. The offset is adjusted in the analog monitor unit at the factory. The
user need not usually use this function. To adjust the offset manually, use this function.
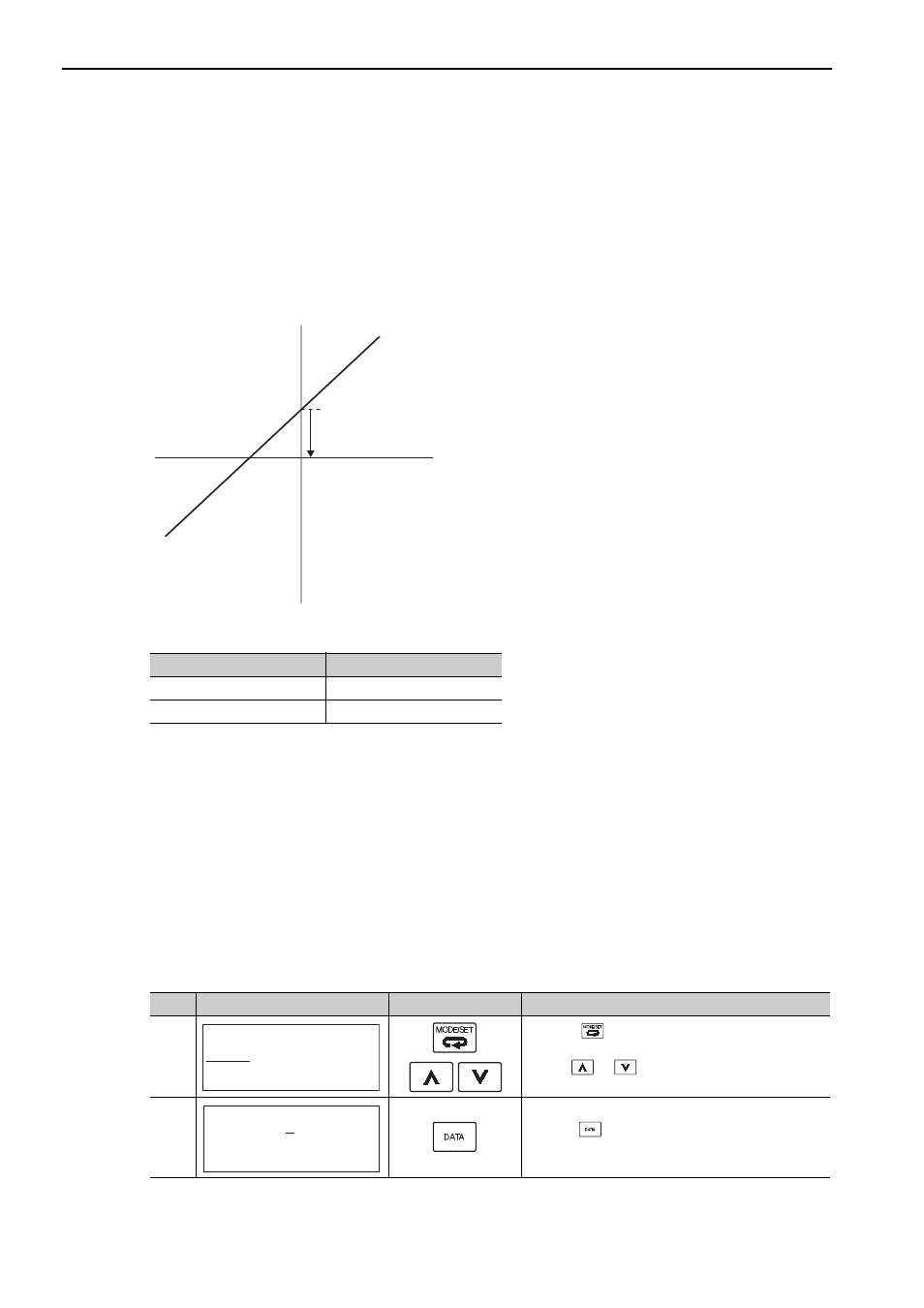
(1) Adjustment Example
An example of offset adjustment to the motor speed monitor is shown below.
Note:
• The adjustment value will not be initialized when parameter settings are initialized using Fn005.
• Make offset adjustment with a measuring instrument connected, so that the analog monitor output is zero. An
example of settings for a zero analog monitor output is shown below.
• While the servomotor is not turned ON, set the monitor signal to the torque reference.
• In speed control, set the monitor signal to the position error.
(2) Preparation
The following condition must be met to adjust the offsets of the analog monitor output.
• The write prohibited setting parameter (Fn010) must be set to Write permitted (P.0000).
(3) Operating Procedure
Use the following procedure.
Item
Specifications
Offset Adjustment Range
-2.4 V to + 2.4 V
Adjustment Unit
18.9 mV/LSB
Analog monitor output
voltage
Motor speed
Offset
adjustment
Step
Display after Operation
Keys
Operation
1
Press the
Key to view the main menu for the
utility function.
Use the
or
Key to move through the list and
select Fn00C.
2
Press the
Key. The display changes to the Fn00C
execution display.
B B
−
F U N C T I O N
−
F n 0 0 B : T r q A d j
F n 0 0 C : M o n Z e r o A d j
F n 0 0 D : M o n G a i n A d j
F n 0 0 E : C u r A u t o A d j
B B
−
Z e r o A D J
−
C H 1 =
−
0 0 0 0 2
C H 2 =
−
0 0 0 0 1
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 0 =
0
0 0 0 0 0