9 compatible adjustment function, 1 feedforward reference (pulse train reference), 2 torque feedforward (analog voltage reference) – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 211: 1) example of connection with host controller, Analog, Ana- log
6 Adjustments
6.9.1 Feedforward Reference (Pulse Train Reference)
6-60
6.9
Compatible Adjustment Function
The DC Power Input
Σ
-V series SERVOPACKs have adjustment functions as explained in sections
6.1
to
6.8
to make machine adjustments.
This section explains compatible functions provided by earlier models, such as the
Σ
-III Series SERVOPACK.
6.9.1
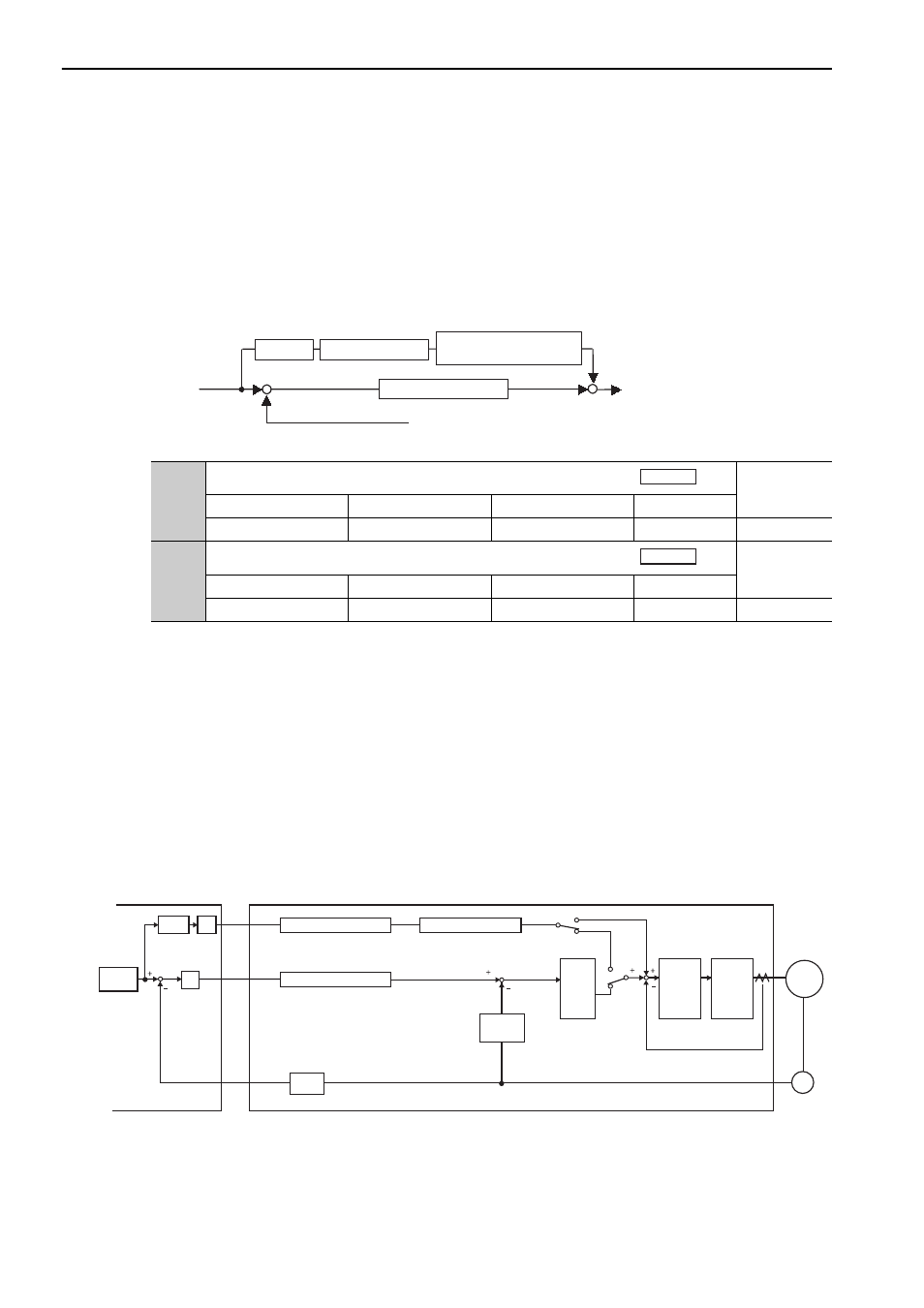
Feedforward Reference (Pulse Train Reference)
This function applies feedforward compensation to position control and shortens positioning time. This function can be
used only with a SERVOPACK for pulse train references.
Note: Too high value may cause the machine to vibrate. For ordinary machines, set 80% or less in this parameter.
6.9.2
Torque Feedforward (Analog Voltage Reference)
The torque feedforward function shortens positioning time. This function can be used only with a SERVO-
PACK for analog voltages.
The host controller finds the difference from the position reference to generate a torque feedforward reference,
and inputs the torque feedforward reference together with the speed reference to the SERVOPACK.
(1) Example of Connection with Host Controller
Connect a speed reference to V-REF (CN1-1 and -2) and a torque feedforward reference to T-REF (CN1-3 and
-4) from the host controller.
+
+ +
-
Pn109
Pn10A
Position
reference pulse
Feedback pulse
Position loop gain (Kp)
Feedforward Gain
Differential
Feedforward Filter
Time Constant
Analog
Pn109
Feedforward Gain
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 100
1%
0
Immediately
Tuning
Pn10A
Feedforward Filter Time Constant
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
0 to 6400
0.01 ms
0
Immediately
Tuning
Position
Position
M
Pn400
T-REF
V-REF
K
P
Pn300
Pn415
Pn212
Pn002.0
ENC
Pn000.1
SERVOPACK (in speed control)
Divider
K
FF
Speed reference input gain
T-REF filter time constant
Differe-
ntial
Host controller
Servomotor
Torque reference input gain
Current feedback
Speed feedback
Kp
KFF : Feedforward gain
: Position loop gain
Position
reference
Encoder
output
pulse
Speed
conversion
Speed
control
section
Current
control
section
Power
amplifier
Ana-
log