2 parameters, Analog – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 288
10 Appendix
10.2.2 Parameters
10-6
10.2.2
Parameters
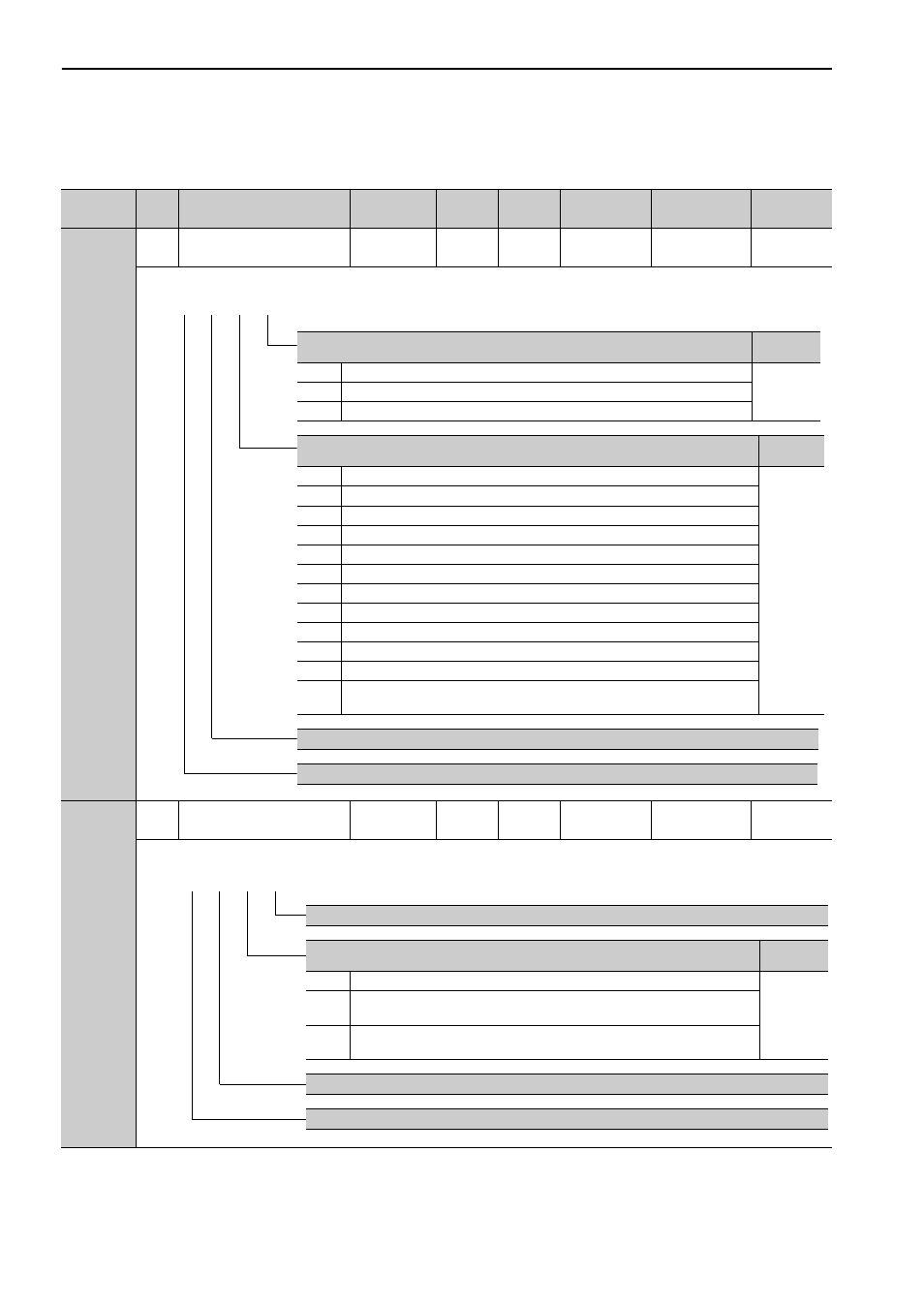
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
Pn000
2
Basic Function Select
Switch 0
0000 to 00B3
−
0000
After restart
Setup
−
Pn001
2
Application Function Select
Switch 1
0000 to 1122
−
0000
After restart
Setup
−
4th 3rd 2nd 1st
digit digit digit digit
n.
Analog
Direction Selection
Reference
Section
0
Sets CCW as forward direction.
5.2.2
1
Sets CW as forward direction. (Reverse Rotation Mode)
2 to 3
Reserved (Do not change.)
Control Method Selection
Reference
Section
0
Speed control (analog reference)
5.7
1
Position control (pulse train reference)
2
Torque control (analog reference)
3
Internal set speed control (contact reference)
4
Internal set speed control (contact reference)
↔
Speed control (analog reference)
5
Internal set speed control (contact reference)
↔
Position control (pulse train reference)
6
Internal set speed control (contact reference)
↔
Torque control (analog reference)
7
Reserved (Do not change.)
8
Reserved (Do not change.)
9
Torque control (analog reference)
↔
Speed control (analog reference)
A
Speed control (analog reference)
↔
Speed control with zero clamp function
B
Position control (pulse train reference)
↔
Position control with reference pulse inhibit
function
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Overtravel (OT) Stop Mode
Reference
Section
0
Stops the motor by coasting.
5.2.3
1
Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to servolock state.
2
Sets the torque of Pn406 to the maximum value, decelerates the servomotor to a stop,
and then sets it to coasting state.
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.