Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 267
9 Troubleshooting
9.1.2 Troubleshooting of Alarms
9-8
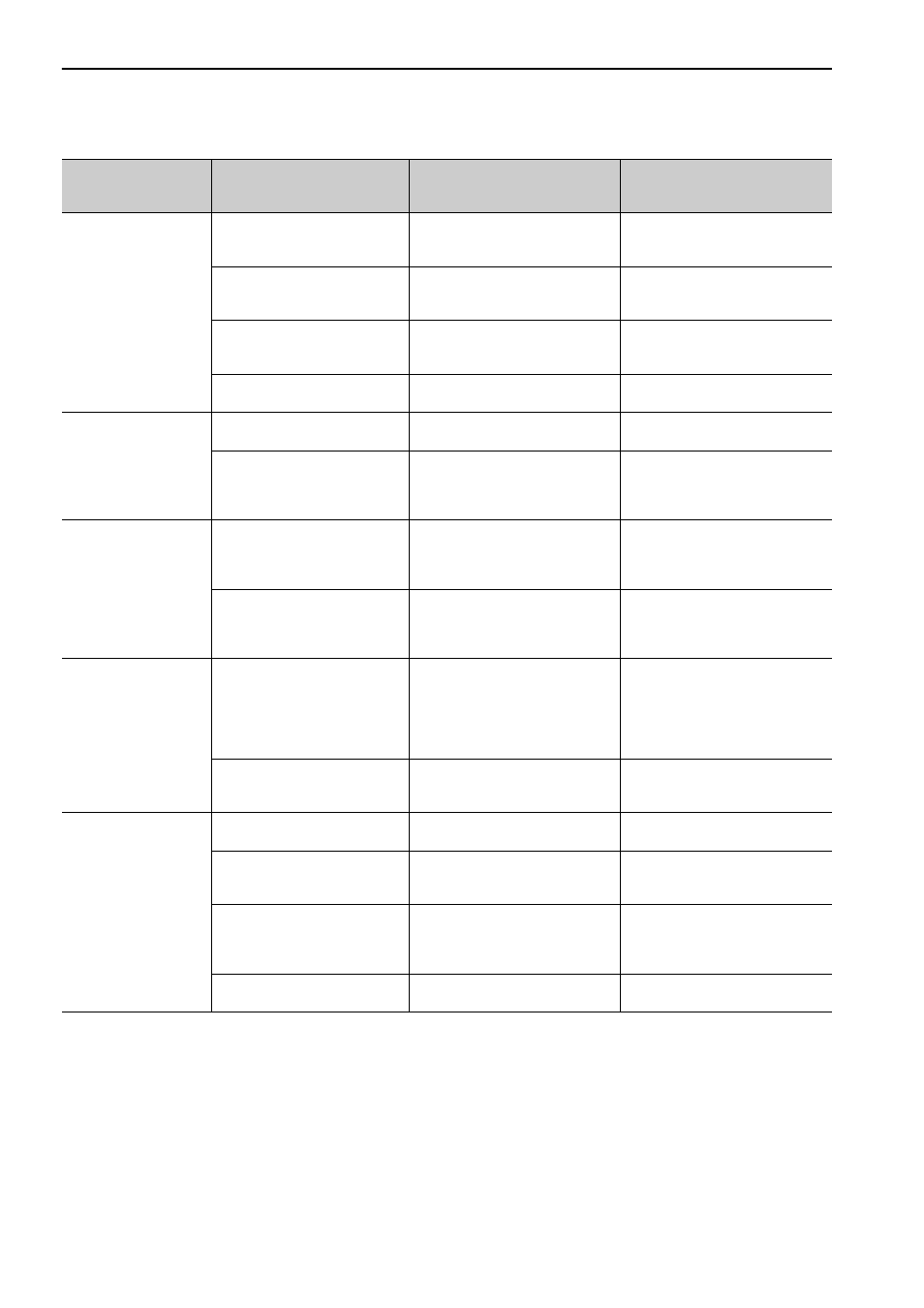
A.510:
Overspeed
(The servomotor speed
exceeds the maximum.)
The order of phases U, V, and W
in the servomotor wiring is incor-
rect.
Check the motor wiring.
Confirm that the servomotor is cor-
rectly wired.
A reference value exceeding the
overspeed detection level was
input.
Check the input value.
Reduce the reference value or adjust
the gain.
The motor speed exceeded the
maximum.
Check the motor speed waveform.
Reduce the speed reference input
gain, adjust the servo gain, or recon-
sider the operating conditions.
A SERVOPACK fault occurred.
−
The SERVOPACK may be faulty.
Replace the SERVOPACK.
A.511:
Overspeed of Encoder
Output Pulse Rate
The encoder output pulse fre-
quency exceeded the limit.
Check the encoder output pulse set-
ting.
Decrease the setting of the encoder
output pulse (Pn212).
The encoder output pulse output
frequency exceeded the limit
because the motor speed was too
high.
Check the encoder output pulse out-
put setting and motor speed.
Decrease the motor speed.
A.520:
Vibration Alarm
Abnormal vibration was detected
at the motor speed.
Check for abnormal noise from the
servomotor, and check the speed
and torque waveforms during oper-
ation.
Reduce the motor speed or reduce
the speed loop gain (Pn100).
The moment of inertia ratio
(Pn103) value is greater than the
actual value or is greatly
changed.
Check the moment of inertia ratio.
Set the moment of inertia ratio
(Pn103) to an appropriate value.
A.521:
Autotuning Alarm
(Vibration was detected
while executing the one-
parameter tuning, Easy-
FFT, or tuning-less func-
tion.)
The servomotor vibrated consid-
erably while performing tuning-
less function.
Check the motor speed waveform.
Reduce the load so that the moment
of inertia ratio falls within the
allowable value, or raise the load
level using the tuning-less levels
setting (Fn200) or reduce the rigid-
ity level.
The servomotor vibrated consid-
erably during one-parameter tun-
ing or EasyFFT.
Check the motor speed waveform.
Check the operation procedure of
corresponding function and take a
corrective action.
A.710:
A.720:
Overload
A.710: High Load
A.720: Low Load
Incorrect wiring or contact fault
of servomotor and encoder.
Check the wiring.
Confirm that the servomotor and
encoder are correctly wired.
Operation beyond the overload
protection characteristics.
Check the servomotor overload
characteristics and executed run
command.
Reconsider the load conditions and
operating conditions. Or, increase
the motor capacity.
Excessive load was applied dur-
ing operation because the servo-
motor was not driven due to
mechanical problems.
Check the executed operation refer-
ence and motor speed.
Remove the mechanical problems.
A SERVOPACK fault occurred.
−
The SERVOPACK may be faulty.
Replace the SERVOPACK.
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions