2) output signals – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 44
3.2 I/O Signal Connections
3-9
3
Wi
ring and
C
onne
ctio
n
Note: Pin numbers in parentheses () indicate signal grounds.
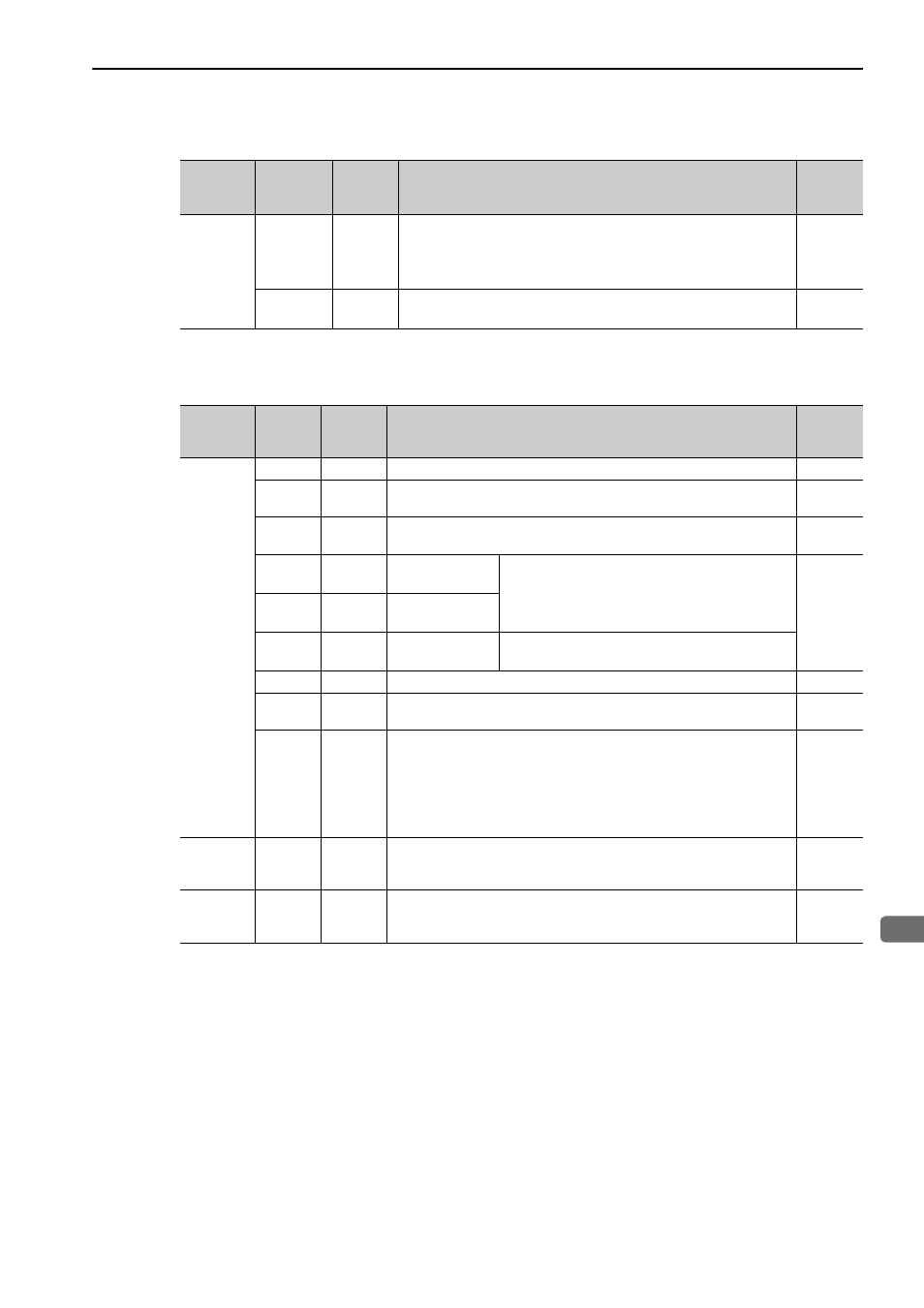
(2) Output Signals
Note 1. The pin number in parentheses is the common ground for output signals (COM_SG).
2. The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) output signals can be changed by using the
parameters. Refer to
3.3.2 Output Signal Allocations
for details.
Pulse
Train
Reference
PULS
/PULS
SIGN
/SIGN
1
2
3
4
Input pulse modes: Select one of them.
• Sign + pulse train
• CW + CCW pulse train
• Two-phase pulse train with 90
°
phase differential
5.4.1
CLR
/CLR
5
6
Clears position error during position control.
5.4.2
(cont’d)
Control
Method
Signal
Name
Pin No.
Function
Refer-
ence
Section
Control
Method
Signal
Name
Pin No.
Function
Refer-
ence
Section
Common
ALM
8 (11)
Turns OFF when an error is detected.
5.10.1
/TGON
9 (11)
Turns ON when the servomotor is rotating at a speed higher than the
motor speed setting.
5.10.3
/S-RDY
10 (11)
Turns ON when the SERVOPACK is ready to accept the servo ON (/S-
ON) signal.
5.10.4
PAO
/PAO
19
20
Phase-A signal
Encoder output pulse signals for two-phase pulse
train with 90
°
phase differential
5.3.6
5.9.5
PBO
/PBO
21
22
Phase-B signal
PCO
/PCO
23
24
Phase-C signal
Origin pulse output signal
SG
13
Signal ground
−
FG
Shell
Connected to frame ground if the shielded wire of the I/O signal cable is
connected to the connector shell.
−
/CLT
/VLT
/BK
/WARN
/NEAR
/PSELA
Can be
allocated
The following output signals can be changed to allocate functions:
/TGON, /S-RDY, and /V-CMP (/COIN).
5.4.3
5.4.7
5.5.4
5.8.5
5.10.2
Analog
Voltage
Reference
/V-CMP
7 (11)
If speed control is selected, the signal turns ON when the motor speed is
within the setting range and it matches the reference speed value.
5.3.8
Pulse
Train
Reference
/COIN
7 (11)
If position control is selected, the signal turns ON when the number of
position error reaches the value set.
5.4.6