Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 265
9 Troubleshooting
9.1.2 Troubleshooting of Alarms
9-6
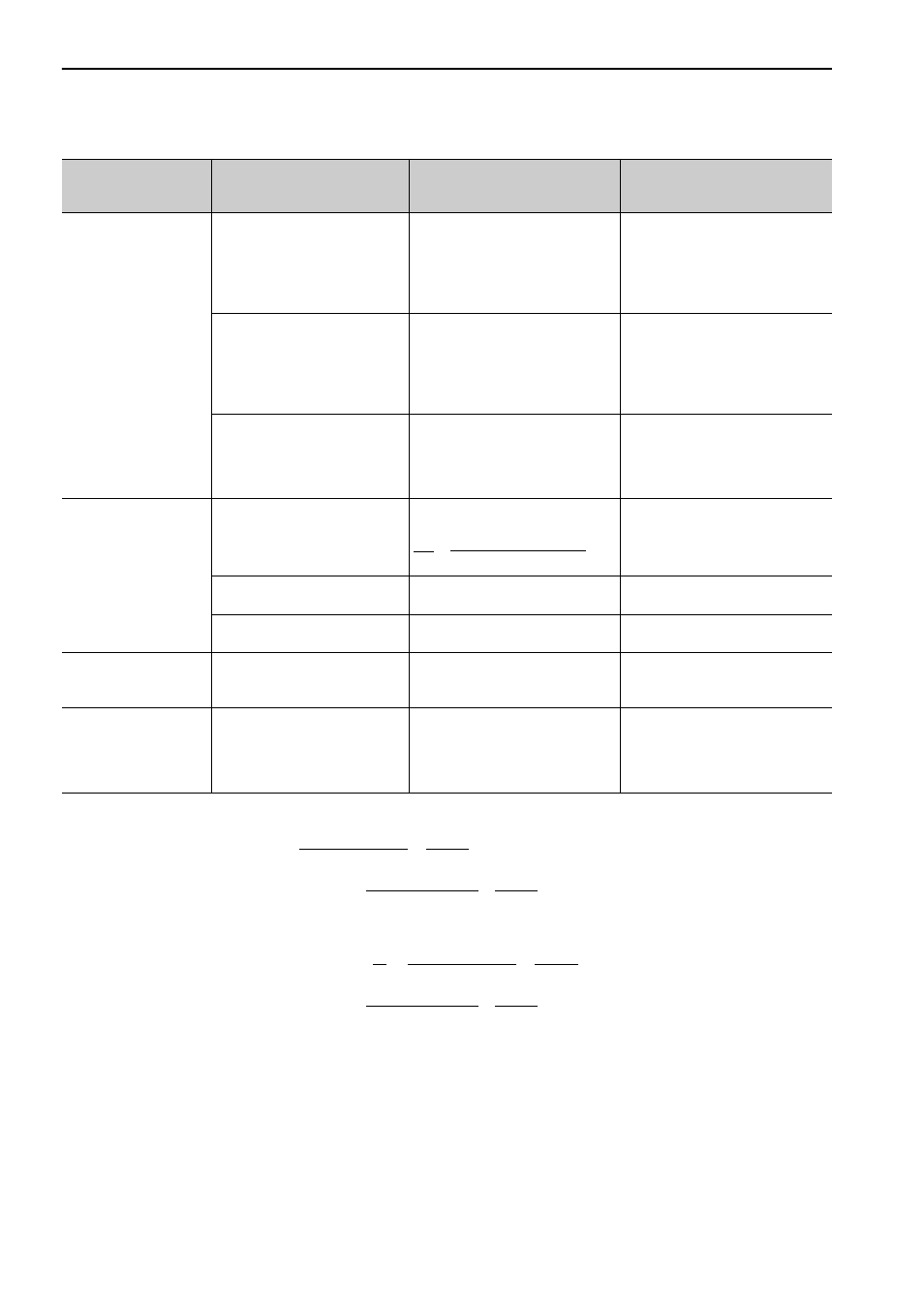
A.042:
Parameter
Combination Error
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the electronic gear ratio
(Pn20E/Pn210) or the servomo-
tor.
Check if the detection conditions
*1
are satisfied.
Decrease the setting of the elec-
tronic gear ratio (Pn20E/Pn210).
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the setting of the pro-
gram JOG movement speed
(Pn533).
Check if the detection conditions
*1
are satisfied.
Increase the setting of the program
JOG movement speed (Pn533).
The moving speed of advanced
autotuning is lower than the set-
ting range after having changed
the electronic gear ratio (Pn20E/
Pn210) or the servomotor.
Check if the detection conditions
*2
are satisfied.
Decrease the setting of the elec-
tronic gear ratio (Pn20E/Pn210).
A.050:
Combination Error
(The SERVOPACK and
servomotor capacities do
not correspond.)
The SERVOPACK and servomo-
tor capacities do not match each
other.
Check the capacities to see if they
satisfy the following condition:
Select the proper combination of
SERVOPACK and servomotor
capacities.
An encoder fault occurred.
Replace the servomotor and see if
the alarm occurs again.
Replace the servomotor (encoder).
A SERVOPACK fault occurred.
−
The SERVOPACK may be faulty.
Replace the SERVOPACK.
A.051:
Unsupported Device
Alarm
An unsupported encoder is con-
nected to the SERVOPACK.
Check the product specifications,
and select the correct model.
Select the correct combination of
units.
A.0b0:
Cancelled Servo ON
Command Alarm
After executing the utility func-
tion to turn ON the power to the
motor, the servo ON signal (/S-
ON) was sent from the host con-
troller.
−
Restart the SERVOPACK or exe-
cute a software reset.
∗1.
Detection conditions
If one of the following conditions detected, an alarm occurs.
•
•
∗2.
Detection conditions
If one of the following conditions detected, an alarm occurs.
•
•
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions
≤
Servomotor capacity
SERVOPACK capacity
≤
4
1
4
Pn533 [min
-1
]
Ч
6
Ч
10
5
Encoder resolution
≤
Pn20E
Pn210
Max Motor Speed [min
-1
]
×
About 3.66
×
10
12
Encoder resolution
≥
Pn20E
Pn210
Rated Motor Speed [min
-1
]
Ч
6
Ч
10
5
Encoder resolution
≤
Pn20E
Pn210
×
1
3
Max Motor Speed [min
-1
]
×
About 3.66
×
10
12
Encoder resolution
≥
Pn20E
Pn210