Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 72
4.3 Trial Operation for Servomotor without Load from Host Reference
4-7
4
Tria
l Ope
ra
tio
n
4.3.2
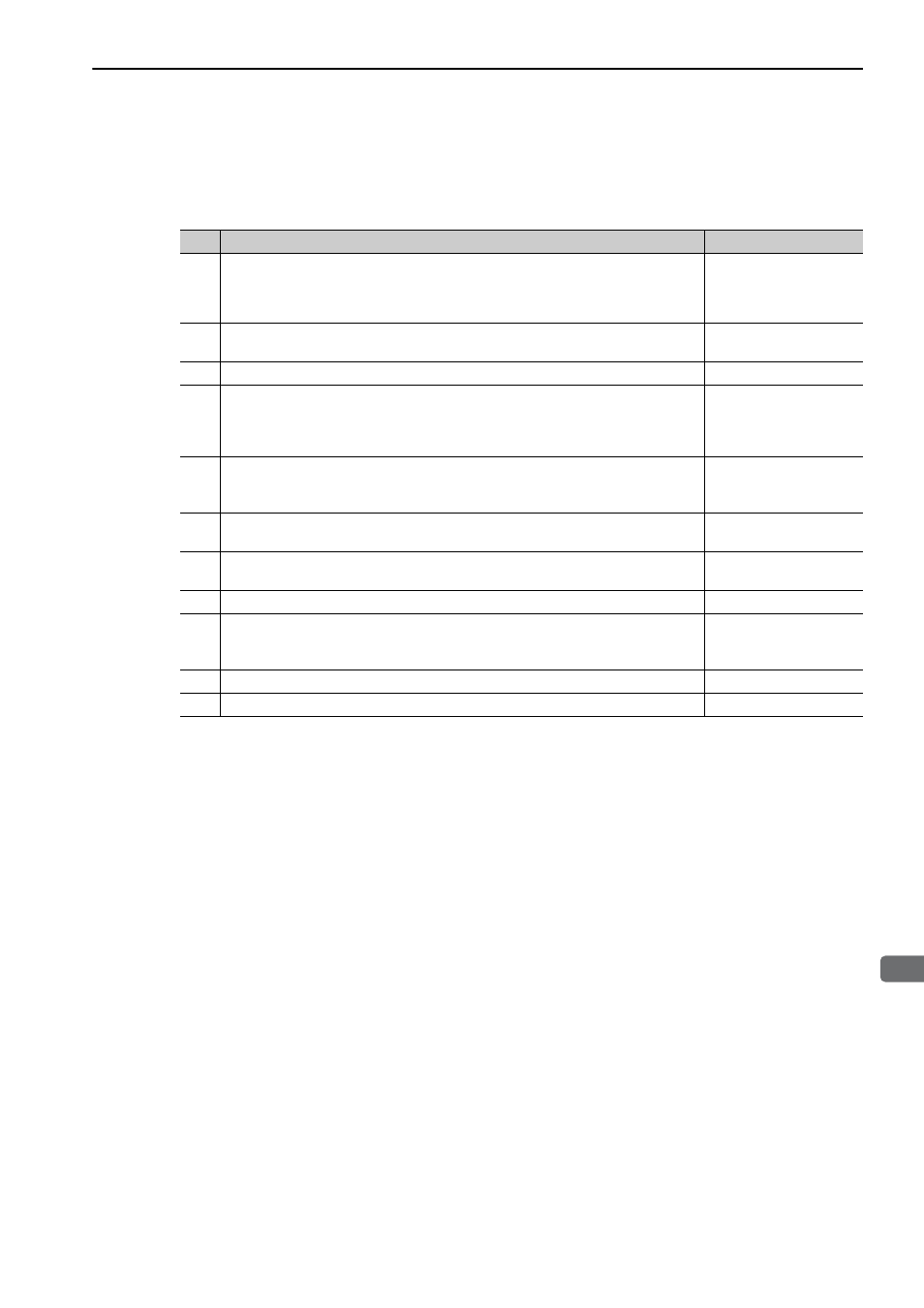
Trial Operation in Speed Control (Analog Voltage Reference)
Perform the following steps for trial operation in speed control (Analog voltage reference). The steps are spec-
ified on the condition that input signal wiring for the speed control has been completed according to
4.3.1
Inspecting Connection and Status of Input Signals
.
Step
Operation
Reference
1
Recheck the power supply and the input signal circuits, and turn ON the SERVO-
PACK control power supply.
3.2.2 Example of I/O Sig-
nal Connections in Speed
Control (Analog Voltage
Reference)
2
Adjust the speed reference input gain (Pn300).
5.3.1 Basic Settings for
Speed Control
3
Turn ON the main circuit power supply of the SERVOPACK.
−
4
Check that speed reference input (the voltage between V-REF and SG) is 0 V, and
turn ON the servo ON (/S-ON) input signal.
Note: If the servomotor rotates at a very low speed with the speed reference input at
0 V, adjust the reference offset so that the servomotor will not rotate.
5.3.2 Reference Offset
Adjustment
5
Gradually increase the voltage of the speed reference input (i.e., the voltage between
V-REF and SG) from 0 V.
Note: The factory setting is 6 V at the rated speed.
5.3.1 Basic Settings for
Speed Control
6
Check the speed reference value using the monitor display (Un001).
8.1 List of Monitor Dis-
plays
7
Check the motor rotating speed using the monitor display (Un000).
8.1 List of Monitor Dis-
plays
8
Check that the values in step 6 and step 7 (Un001 and Un000) are equal to each other.
−
9
Check the motor rotation direction.
Note: To switch the motor rotation direction without changing the polarity of the
analog speed reference, refer to
5.2.2 Servomotor Rotation Direction
.
5.2.2 Servomotor Rota-
tion Direction
10
Return the speed reference input to 0 V.
−
11
Turn OFF the servo ON signal (/S-ON).
−