Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 202
6.7 Vibration Suppression Function (Fn205)
6-51
6
Adjustments
(3) Related Function on Vibration Suppression Function
This section describes functions related to vibration suppression function.
Feedforward
The feedforward gain (Pn109), speed feedforward (V-REF) input, and torque feedforward (T-REF) input will
be disabled in the factory setting.
Set Pn140.3 to 1 if model following control is used together with the speed feedforward (V-REF) input and
torque feedforward (T-REF) input from the host controller.
6
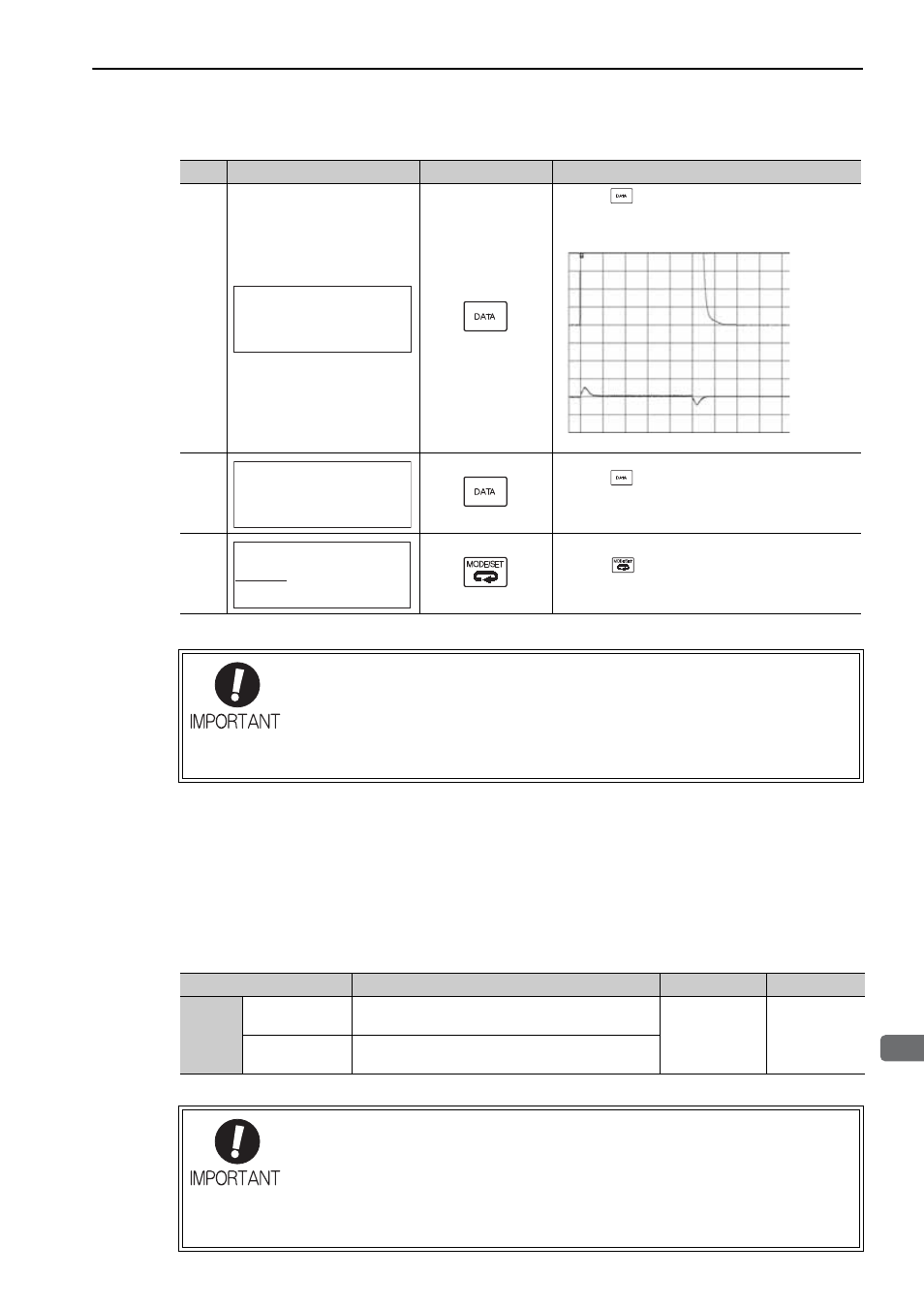
Press the
Key. The "Setting f" will change to
usual display and the frequency currently displayed
will be set for the vibration suppression function
.
Example of measured waveform
7
Press the
Key to save the setting. "DONE" will
flash for approximately two seconds and "RUN" will
be displayed again.
8
Press the
Key to complete the vibration suppres-
sion function. The screen in step 2 will appear again.
No settings related to the vibration suppression function will be changed during opera-
tion.
If the servomotor does not stop approximately 10 seconds after the setting changes, a
timeout error will result and the previous setting will be automatically enabled again.
The vibration suppression function will be enabled in step 6. The motor response, how-
ever, will change when the servomotor comes to a stop with no reference input.
(cont’d)
Step
Display after Operation
Keys
Operation
㧾㨁㧺 ̆㨂㨕㨎 㧿㨡㨜̆
㧹㨑㨍㨟㨡㨞㨑 㨒㧩㧜㧝㧜㧚㧠㧴㨦
㧿㨑㨠㨠㨕㨚㨓 㨒㧩㧜㧝㧞㧚㧠㧴㨦
Position
Error
Torque
reference
㧾㨁㧺 ޓޓ ̆㨂㨕㨎 㧿㨡㨜̆
㧹㨑㨍㨟㨡㨞㨑㨒 㧩㧙㧙㧙㧙㧙㧴㨦
㧿㨑㨠㨠㨕㨚㨓㨒 㧩㧜㧝㧞㧚㧠㧴㨦
㧾㨁㧺 ̆㧲㨁㧺㧯㨀㧵㧻㧺̆
㧲㨚㧞㧜㧠
㧲㨚㧞㧜㧡
㧲㨚㧞㧜㧢
㧲㨚㧞㧜㧣
Parameter
Function
When Enabled Classification
Pn140
n.0
[Factory setting]
Model following control is not used together with the
speed/torque feedforward input.
Immediately
Tuning
n.1
Model following control is used together with the
speed/torque feedforward input.
• Model following control is used to make optimum feedforward settings in the SERVO-
PACK when model following control is used with the feedforward function. Therefore,
model following control is not normally used together with either the speed feedfor-
ward (V-REF) input or torque feedforward (T-REF) input from the host controller. How-
ever, model following control can be used with the speed feedforward (V-REF) input
or torque feedforward (T-REF) input if required. An improper feedforward input may
result in overshooting.