Analog – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 45
3 Wiring and Connection
3.2.2 Example of I/O Signal Connections in Speed Control (Analog Voltage Reference)
3-10
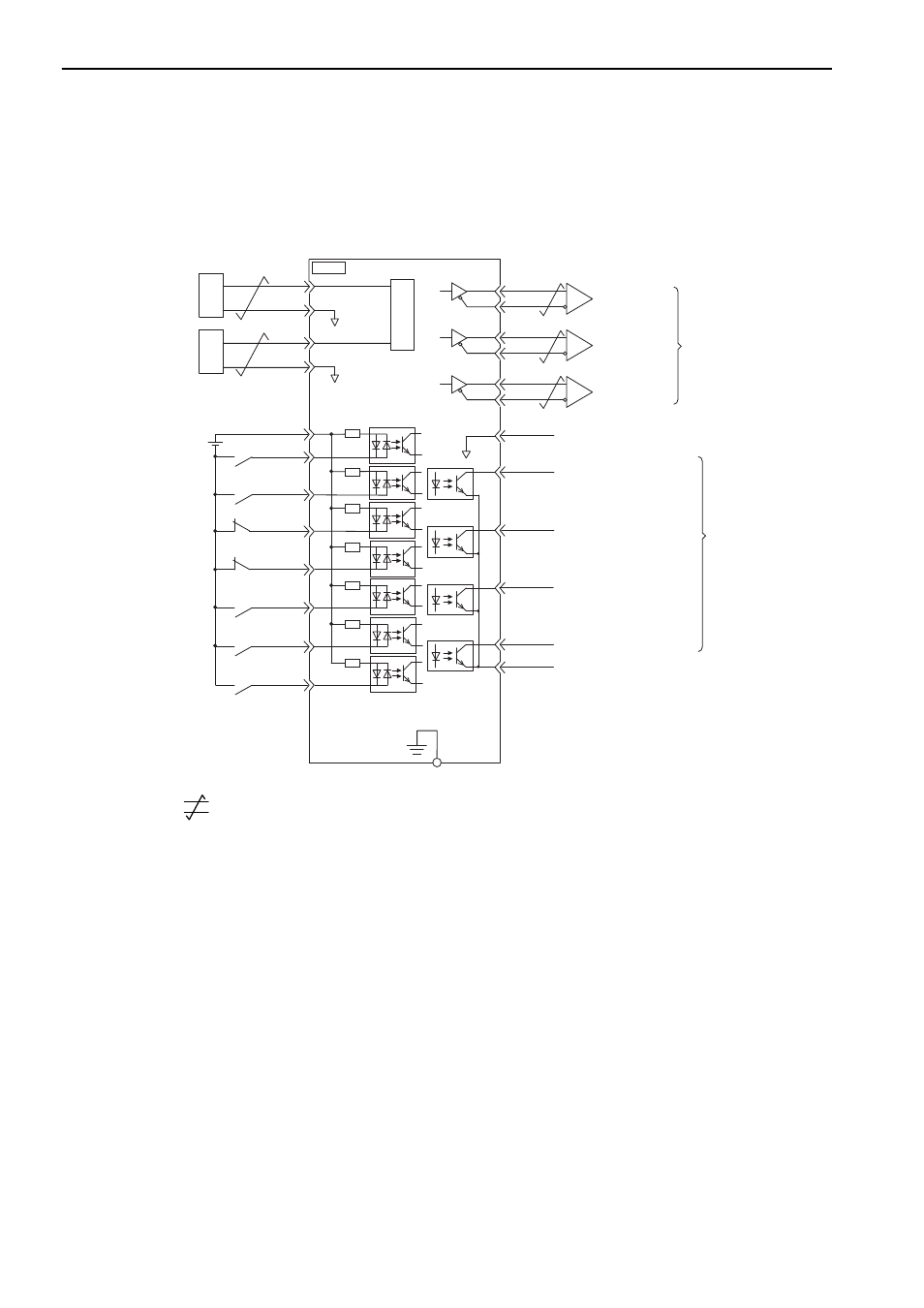
3.2.2
Example of I/O Signal Connections in Speed Control (Analog Voltage
Reference)
Connection example in speed control is as shown below.
∗1.
represents twisted-pair wires.
∗2.
If using an absolute encoder, allocate the SEN signal to one of the seven input signals.
∗3.
Enabled by the parameter setting.
∗4.
The 24-VDC power supply is not included. Use a 24-VDC power supply with double insulation or reinforced insula-
tion.
∗5.
Always use line receivers to receive the output signals.
PBO
PCO
/PBO
PAO
/PAO
/PCO
/V-CMP
ALM
/TGON
/S-RDY
FG
4
8
9
10
11
7
13
23
19
20
21
22
24
+24 V
+24 VIN
3.3 k
Ω
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/N-CL
14
16
18
17
25
26
/P-CL
12
15
∗
4
COM SG
SG
V-REF
SG
A / D
1
2
∗
1
∗
5
∗
5
∗
5
T-REF
SG
3
CN1
D/A
D/A
∗
2
SERVOPACK
Servo ON
(Servo ON when ON)
Reverse run prohibited
(Prohibited when OFF)
Forward run prohibited
(Prohibited when OFF)
Alarm reset
(Reset when ON)
Reverse external torque limit
(Limit when ON)
Forward external torque limit
(Limit when ON)
P control
(P control when ON)
Speed reference
(Max. input
voltage range:
±
12 V)
External torque
limit/Torque feed
forward
(Max. input
voltage range:
±
12 V)
Rotation detection output
(ON when the motor speed
exceeds the settings.)
Servo ready output
(ON when ready)
Servo alarm output
(OFF for an alarm)
Speed coincidence detection
(ON when speed coincides.)
Connect shield to
connector shell.
Connector
shell
Encoder output
pulse phase A
Encoder output
pulse phase B
Encoder output
pulse phase C
Applicable line receiver:
SN75ALS175 or
MC3486 manufactured
by Texas Instruments or
the equivalent
Photocoupler output
Max. operating voltage:
30 VDC
Max. output current:
50 mA DC
SERVOPACK
Analog