Movvel> block fault condition – Yaskawa MP2000 User Manual
Page 97
TECHNICAL NOTE
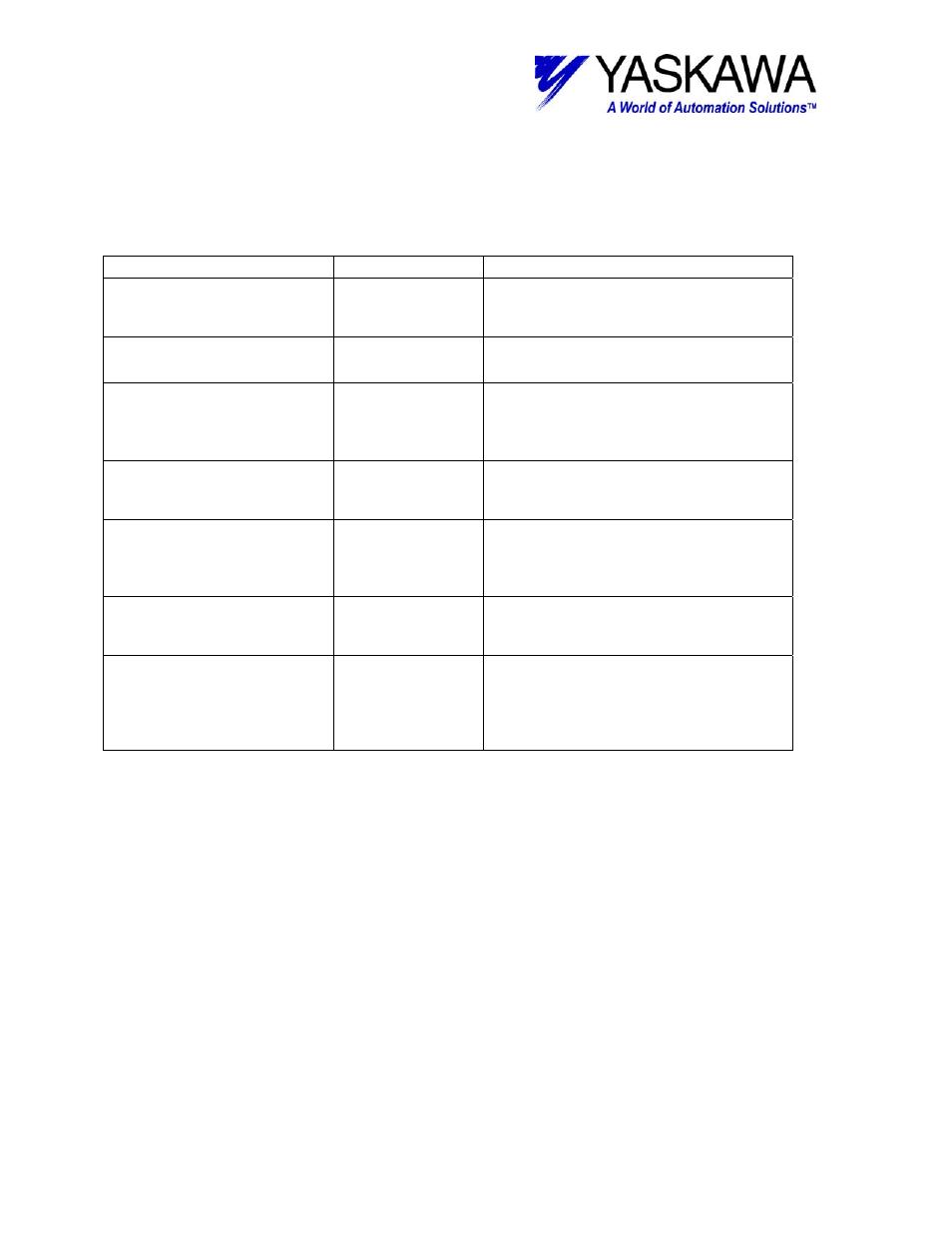
The following table outlines several situations that may cause an error, and will turn on
the blocks “Error” output bit. The block “Error” output will cleared if the EXECUTE bit
goes low
Internal error bit
Cause
Attention
inerr
AB000004
DIRECTIO and
VELOCITY input
are out of range.
Value must be in range or an error will
occur. Sets RDA Error ID (MW3**81) bit 3
on if error state exists.
inspeed
AB00000C
VELOCITY input is
out of range.
Value must be in range or an error will
occur.
mover
AB00000E
Direction input is
set to current
direction and axis
is not moving.
The axis has to be moving in a direction
for this block to work in ‘Continue in
current direction’ mode. This does not set
the RDA Error ID.
errStop
AB000042
Motion
commanded and
servo is faulted.
If block is running and the servo is faulted
the error bit will be set. Sets RDA Error ID
(MW3**81) bit B on if error state exists.
axisInErr
AB000045
The axis number
entered on the
input is not an
acceptable value
The function blocks can only control 1 to
16 axes. Any value greater or smaller
then this will cause an error. This does
not set the RDA Error ID.
commanderr
AB000041
Another block took
control of the axis
If the block looses control of the axis while
running an error will occur. This does not
set the RDA Error ID.
direrror
AB00000F
The direction
commanded to
travel is disabled
from the SVON
block.
The SVON block must be used and have
the direction commanded enabled. Sets
RDA Error ID (MW3**81) bit 4 on if error
state exists.
File: MP2000_IndividualFunctionDocument_RevC 97/168
Doc Number: eng.MCD.05.101
11/17/2005