Tuning> block fault condition – Yaskawa MP2000 User Manual
Page 115
TECHNICAL NOTE
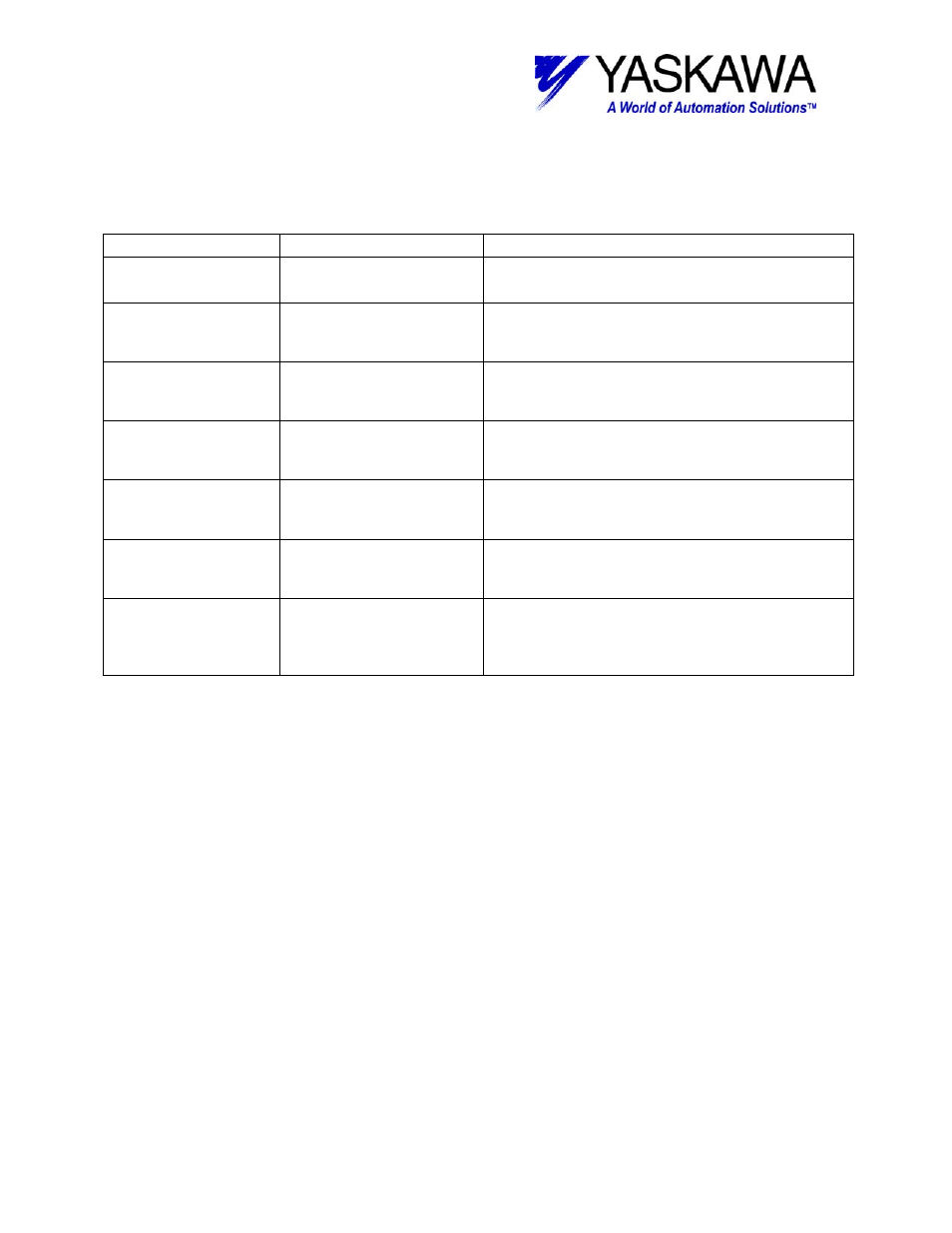
The following table outlines several situations that may cause an error, and will turn on
the blocks “Error” output bit. The block “Error” output will cleared if the EXECUTE bit
goes low.
Internal Fault Bit
Cause
Note
feedfwdOut
AB000001
Feed forward value is not
within acceptable range.
Goes high if the set value is in range. Sets bit3 of
RDA Error ID(MW3**81) if error occurs.
spdLoopOut
AB000002
Speed loop gain value is
not within acceptable
range.
Goes high if the set value is in range. Sets bit3 of
RDA Error ID(MW3**81) if error occurs
posLoopOut
AB000003
Position loop gain value is
not within acceptable
range.
Goes high if the set value is in range. Sets bit3 of
RDA Error ID(MW3**81) if error occurs.
SPDTiout
AB000019
Speed loop integration
time value is not within
acceptable range.
Goes high if the set value is in range. Sets bit3 of
RDA Error ID(MW3**81) if error occurs
PosTiOut
AB00001A
Position loop integration
time value is not within
acceptable range.
Goes high if the set value is in range. Sets bit3 of
RDA Error ID(MW3**81) if error occurs
axisInErr
AB00014A
The axis number entered
on the input is not an
acceptable value
The function blocks can only control 1 to 16 axis.
Any value greater or smaller then this will cause an
error. his does not set the RDA Error ID.
RDA_Error
AB000006
The module or axis
number in the RDA is not
acceptable.
Goes high if the Motor Rated Speed (MW3**73) or
Encoder resolution (ML3**74) is not appropriately
set up in RDA. Sets bit A of RDA Error
ID(MW3**81) if error occurs..
File: MP2000_IndividualFunctionDocument_RevC 115/168
Doc Number: eng.MCD.05.101
11/17/2005