Yaskawa MP2000 User Manual
Page 20
TECHNICAL NOTE
File: MP2000_IndividualFunctionDocument_RevC 20/168
Doc Number:
EF.MCD.05.101
11/17/2005
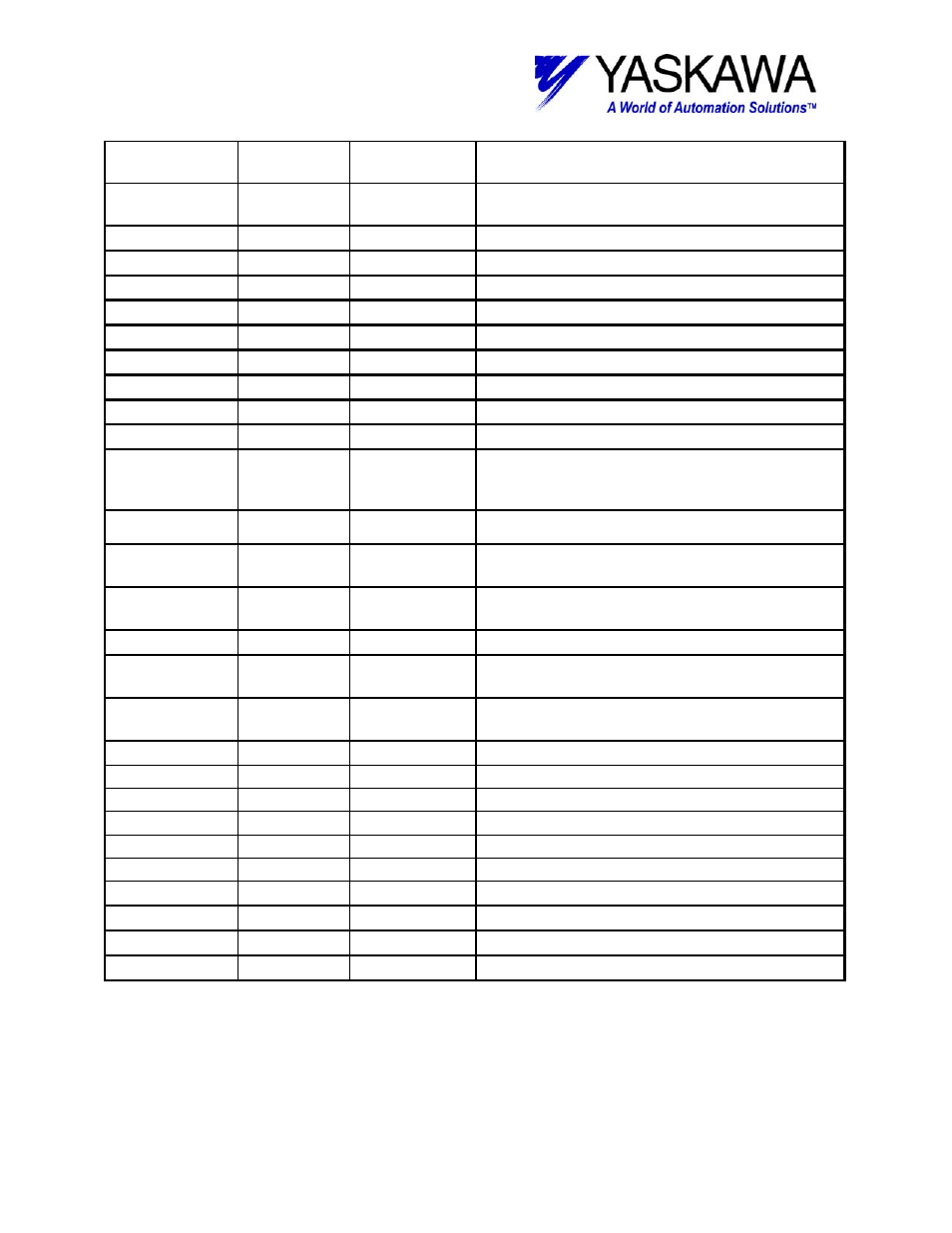
Bit E
Working
cmndError
One shot coil for when another block takes control
from this block.
Bit F
Working
direrr
On if a direction is commanded that is not enabled
by the SVON block.
AW00002
Working
mstr_slave
MstrSlave [value of (XW00001) – 1]
AW00003
Working
filter1
Temporary values used to filter bits.
AW00004
OUT
camstate
Directly controls YW00001 (STATE Output).
AW00005
Bit 0
Working
axisInErr
Goes high for one scan if Axis input is out of range.
AL00006
Working
yFirst
First position of slave in Cam table.
AL00008
Working
yLast
Last position of slave in Cam table.
AL00010
Working
xLast
Last position of Master in Cam table.
AL00012
Working
lastAddress
Final register address of Cam table.
AL00014
Working
Window
Tolerance value for engage and disengage
position. Divide XLAST by 120. IE – this window
is 0.8% of the machine cycle.
AL00016
Working
masterpos
Value of Master after CAM shift.
AL00018
Working
engage_differe
nce
Distance from engage or disengage point.
AL00020
Working
base_slave_po
s
Reserved
AL00022
Working
fgnOut
Value returned from Cam table function generator
AL00024
Working
slave_Pos_Cm
nd
Reserved
AL00026
Working
deltaY
Difference between first and last slave position in
table, used if it’s a one-way cam to offset the slave
AW00028
Bit 0
Working
ESTOP_Latch Latch
E-stop
Condition
Bit 1
Working
RECV_MODE
In Recovery Motion
Bit 2
Working
RECV_COMP
Recovery Motion Complete
Bit 3
Working
Oneshot283 Reserved
Bit 4
Working
Oneshot284 Reserved
Bit 5
Working
RECV_SHOT
Reset Error after Recovery motion is done
AW00029
Working
Timer
Positioning Completion Timer for E-Stop recovery
AW00030
Working
rdaMult
Value for address offset to locate proper RDA
AW00031
Working
Revision
Revision Level of Block.