Rdamult, Revision – Yaskawa MP2000 User Manual
Page 86
TECHNICAL NOTE
AW00001
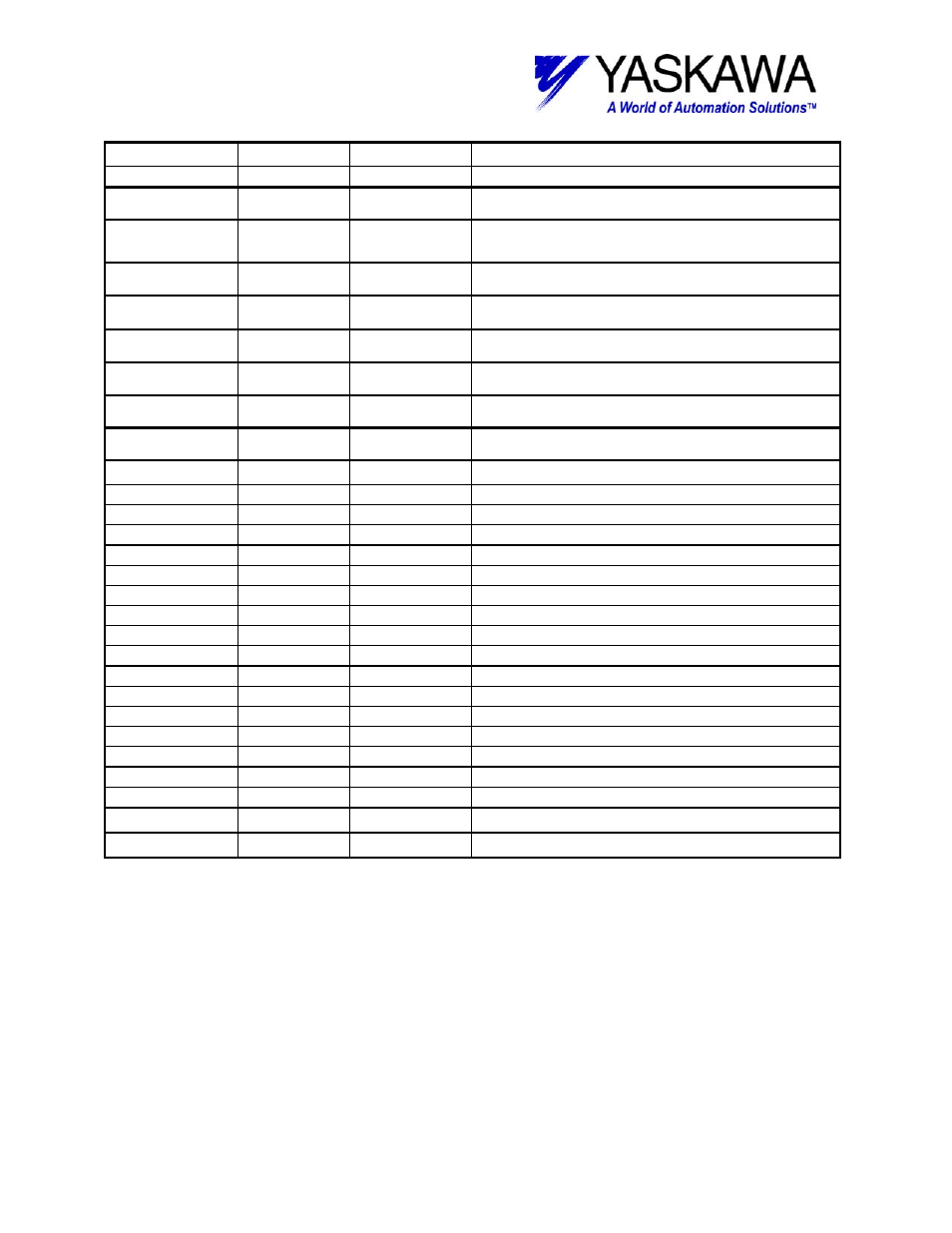
Working
oneshot10
Reserved
AL00002
Working
startPos
Commanded position of axis at execution of block.
AL00004
Working
distGone
Distance traveled by axis under the control of this
block
AL00006
Working
movPos
Commanded Position
AL00008
Working
encoder_start
Fed back position at start.
AL00010
Working
mcHalf
½ machine cycle
AL00012
Working
negMChalf
Negative ½ machine cycle
AW00014
Bit 0
Working
posjump
Reserved
Bit 1
Working
negJump
Reserved
Bit 2
Working
oneshot2
Reserved
Bit 3
Working
errStop
Goes high if servo faults out while running.
Bit 4
Working
oneshot4
Reserved
Bit 5
Working
comp_oneshot
Rising pulse of Positioning complete
Bit 6
Working
poswrap
Reserved
Bit 7
Working
negWrap
Reserved
Bit 8
Working
oneshot148
Reserved
Bit 9
Working
inrngAxis
Goes high for one scan if Axis input is in range.
Bit A
Working
axisInErr
Latches high if Axis input is out of range.
Bit B
Working
onePass
One shot coil for initializing axis data
Bit C
Working
oneshot14c
Reserved
Bit D
Working
run
Run Command.
Bit E
Working
pos_comp
Confirmation of positioning completed.
Bit F
Working
closePass
Internal use for the next time execution.
AW00015
Working
rDAmult
Value for address offset to locate proper RDA
AW00016
Working
Revision
Revision Level of the function block.
File: MP2000_IndividualFunctionDocument_RevC 86/168
Doc Number: eng.MCD.05.101
11/17/2005