Gear function, Gear> function block summary, Gear – Yaskawa MP2000 User Manual
Page 34
TECHNICAL NOTE
File: MP2000_IndividualFunctionDocument_RevC 34/168
Doc Number:
EF.MCD.05.101
11/17/2005
GEAR function
Function block for MP2000 series
The “Gear” block is used to slave the given axis to any defined real or virtual master pulse data. There
are two gearing modes of operation, Rigid Gearing and Non-Rigid Gearing. In either mode, when the
slave is successfully following the master position at the geared ratio (speed match event), the tracking
output will turn on. Other features of ‘slave stop’ or ‘slave continue at current speed’, are also available
when disengaging gearing. Refer to the attached timing chart for details.
Rigid
gearing will phase lock the slave, following position to a specified ratio of the master position
data, at the exact moment of the gear engage signal. If the master pulse is already moving, the slave
will accelerate at a rate set by the RDA, and over-speed to catch up to the master position phase.
The over-speed is limited to the maximum velocity set in the RDA.
Non-Rigid
gearing will cause the slave to follow the speed of the master. If the master pulse is
already moving, the slave will accelerate at a rate set by RDA, but will lag in position equal to the area
under the acceleration curve (it will remain phase locked after speed is matched and in tracking
mode).
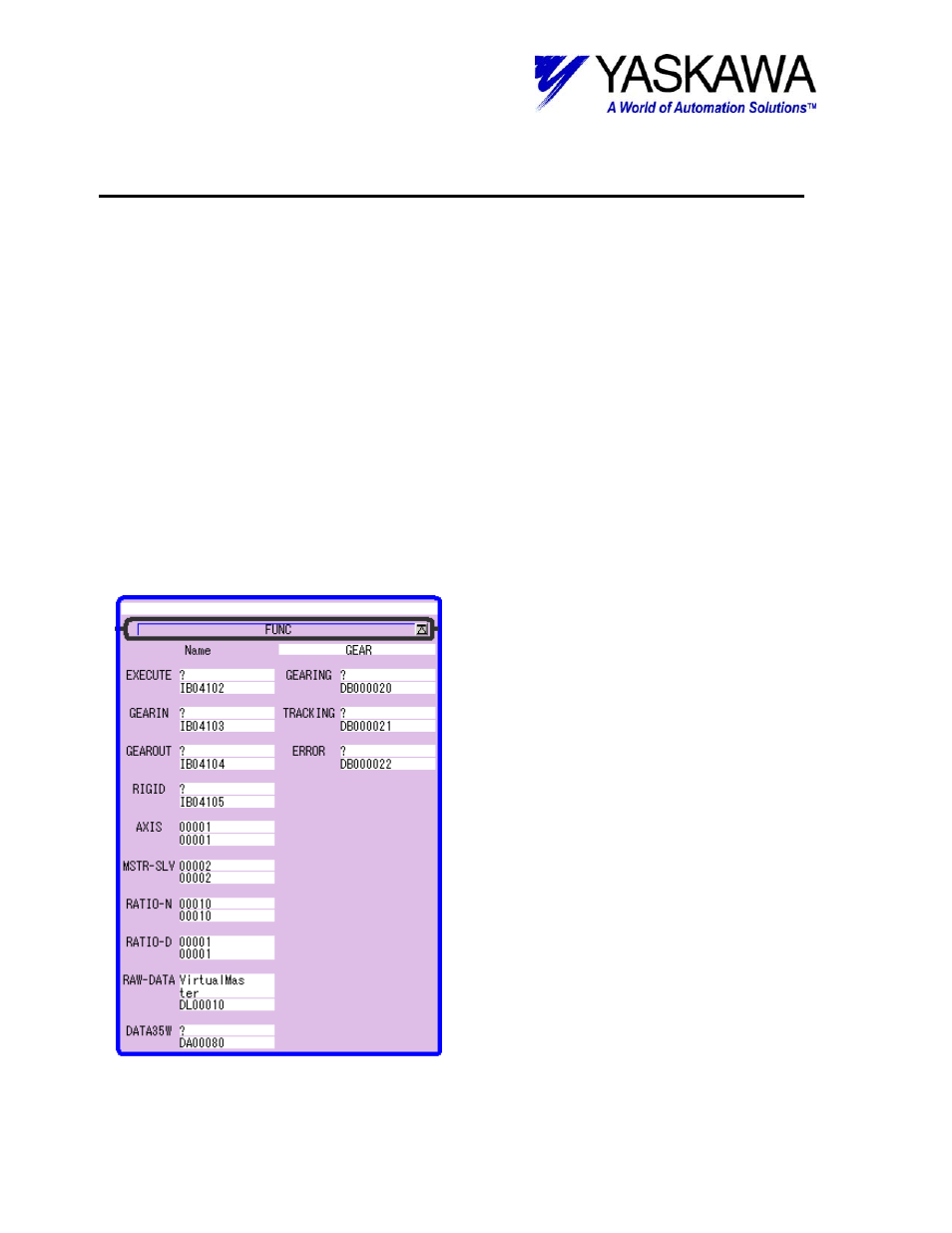
Function Block Diagram