Yaskawa MP2000 User Manual
Page 120
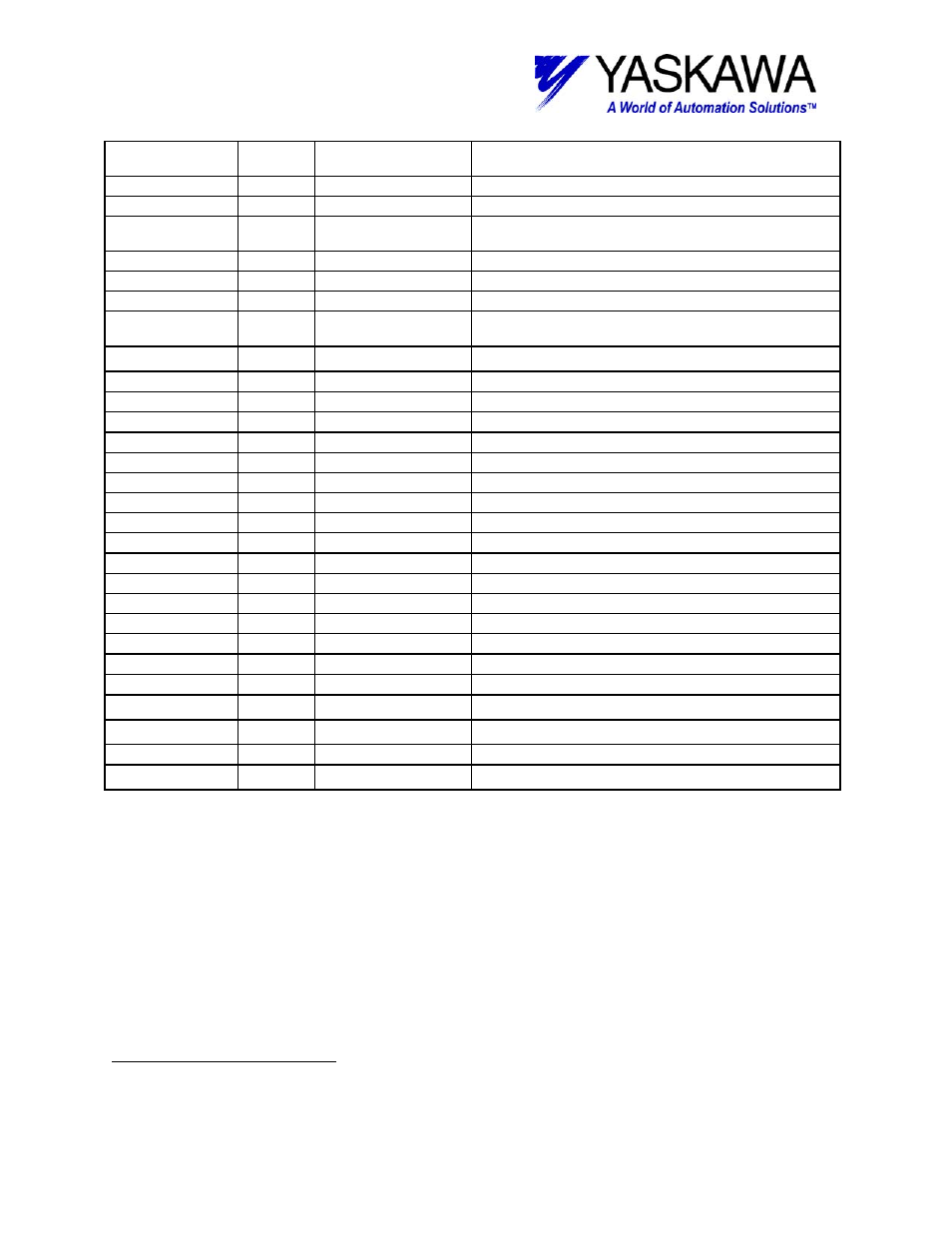
TECHNICAL NOTE
Bit
8
Working START_STEP2
Goes High at the start of Step 2. Step1 and Step2 operation are
different if A81 alarm exist or not.
Bit
9
Working OneShotAB09
Reserved
Bit
A
Working Running
Directly controls YB000000 (RUNNING Output)
Bit
B
Working Step2_Complete
Goes High at the end of Step 2. Step1 and Step2 operation are
different if A81 alarm exist or not.
Bit
C
Working OneShotAB0C
Reserved
Bit
D
Working OneShotAB0D
Reserved
Bit
E
Working NWORK_SVPACK_ALM Goes ON if any Network Servopack alarms exist.
Bit
F
Working ABS_ENCODER_A81
Goes ON if Network Servo alarm is an A.81 – Absolute Encoder
Backup Alarm.
AW00001
WORKING_REG1
Bit
0
Working TimeOut_Error
Goes high for second scan of Block only.
Bit
1
Working OneShotAB11
Reserved
Bit
2
Working RDA_Range_Error
Goes ON If RDA is out of range
Bit
3
Working ALARM_CLR_STEP3
Issue of step 3: and Alarm clear
Bit
4
Working CmdCode_Error
On first pass, MCC was other than Zero
Bit
5
Working Svon_Error
On first pass, Servo was ON (enabled)
Bit
6
-
Unused
Bit
7
_
Unused
Bit
8
OUT
Op_Error
Directly controls YB000002 (ERROR Output)
Bit
9
OneShotAB19
Reserved
Bit
A
OUT
Op_Done
Directly controls YB000001 (DONE Output)
Bit
B
OneShotAB1B
Reserved
Bit
C
Working Op_DoneOneShot
Operation Done Flag
Bit
D
_
Unused
Bit
E
Working Step1
Step one has started and in operation
Bit
F
Working Step1_Complete
Step one as completed
AW00002
Working
OFFSET_STORAGE
Value for address offset to locate proper RDA
AW00003
Working
DRIVE_STAUS_LOCAL
State of Network Servo Axis (bit by bit) from RDA
Bit
1
Working
Svon_FB
Axis Servo ON (enabled)
AW00004
Working Revision
Revision
Level of the function block.
1
This register (AW00003)holds the entire bit by bit value of motion Monitor Parameter IWxx01. Only one
bit is used in this function block: Servo ON (Enabled), bit 1.
File: MP2000_IndividualFunctionDocument_RevC 120/168
Doc Number: eng.MCD.05.101
11/17/2005