Delta Electronics VFD-M User Manual
Page 82
Chapter 4 Parameters|
Revision May 2008, ME14, SW V3.04
4-47
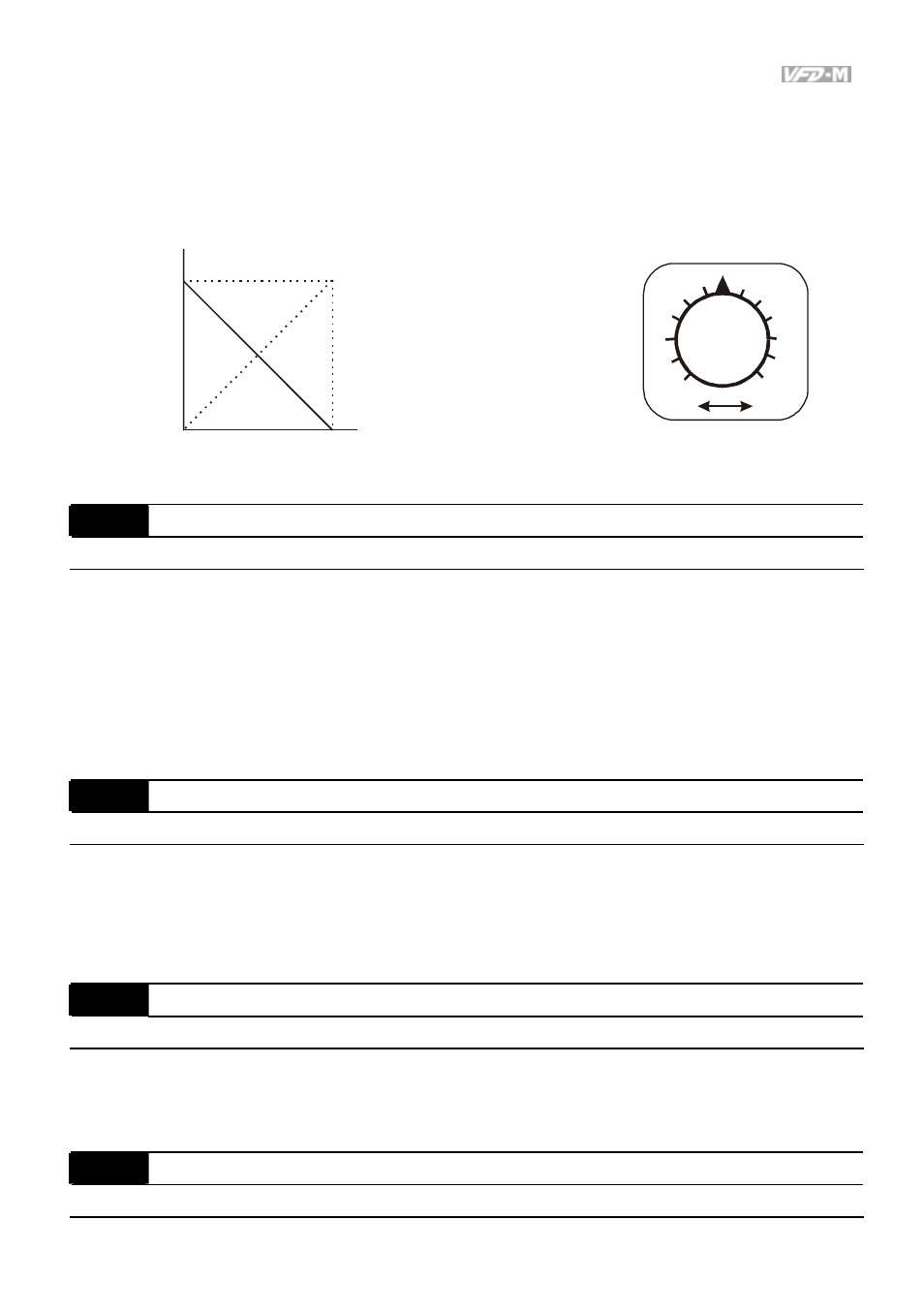
Example 8:
This example shows how to set up the “anti-slope”, which is an inversely proportional variation of
frequency to the input analog signal, required for some applications in process control. A sensor will
generate a large signal (such as 20mA or 10V) and the AC Drive will slow or stop.
Hz
0V
4mA
10V
20mA
30
60
0
Potentiometer Scale
Max.
Output
Freq.
60Hz
Pr.03
0Hz
0V
4mA
10V
20mA
Factory Settings
Pr.03=60Hz--Max. output Freq.
Pr.48=100%--bias adjustment
Pr.49=1 -- bias polarity
Pr.50=100% -- pot. freq. gain
Pr.51=1 -- REV. motion enable
in negative bias
anti-slope
Pr.52
Motor Rated Current
Unit: 0.1A
Settings 30.0% FLA to 120.0% FLA
Factory Setting: FLA
Factory setting is the AC drive rated current. When setting this parameter, just input the motor
rated current value without any calculation.
Use the following criteria to determine the setting of this parameter: no-load current < rated
current of motor < rated current of AC drive. You can use this parameter to limit the output
current to the motor as to prevent overheat.
Pr.53
Motor No-Load Current
Unit: 0.1A
Settings 00%FLA to 99%FLA
Factory Setting: 0.4*FLA
The rated current of the AC drive means 100%. Setting of this parameter affects the slip
compensation. The setting value must be smaller than the motor rated current setting in Pr.52.
(this parameter displays the value of actual current.)
Pr.54
Torque Compensation
Settings 00 to 10
Factory Setting: 00
This parameter forces the AC drive to increase its voltage output during start-up in order to
obtain a higher initial starting torque.
Pr.55
Slip Compensation
Settings 0.00 to 10.00
Factory Setting: 0.00