10 parameter description – ebm-papst ECI-63.XX-K4 User Manual
Page 98
98
10 Parameter Description
Parameter 0x1E: Speed controller KP
Description: Amplification factor (gain) for the proportional component in the speed controller.
Parameter 0x1F: Speed controller KI
Description: Amplification factor (gain) for the integral component in the speed controller.
Parameter 0x20: Speed controller KD
Description: Amplification factor (gain) for the differential component in the speed controller.
Parameter 0x21: K_ff
Description: The parameter K_ff (speed control input) is a link between the ramp generator target speed output and the setpoint of the speed controller
input.
This parameter can be used to zero the setpoint input of the speed controller or pass the ramp generator input to the speed controller with additional gain.
See also
“Parameter 0x1E: Speed controller KP”
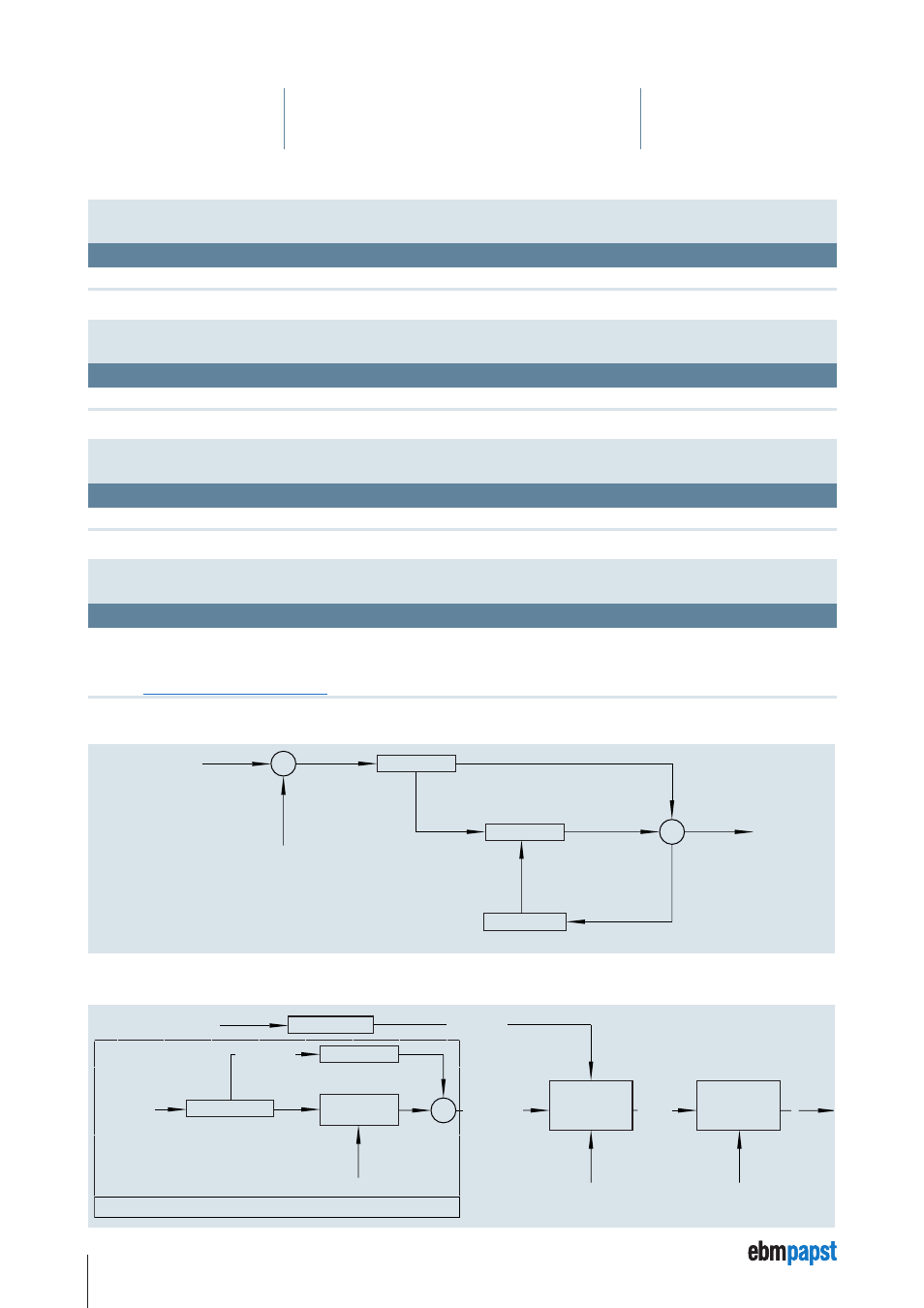
PI controller structure
Target speed
+
+
Actual speed
dyn anti windup
KP
KI
Control structure K4
+
Target speed
Ramp generator
Target speed
Target position
K_ff
Position controller
K_p
Actual position
Speed controller
K_p
K_I
Actual speed
Target speed
Ramp generator
Target speed
Current controller
K_p
K_I
Actual current
Only positioning
I-Target
V