6 parameterisation – ebm-papst ECI-63.XX-K4 User Manual
Page 33
33
6 Parameterisation
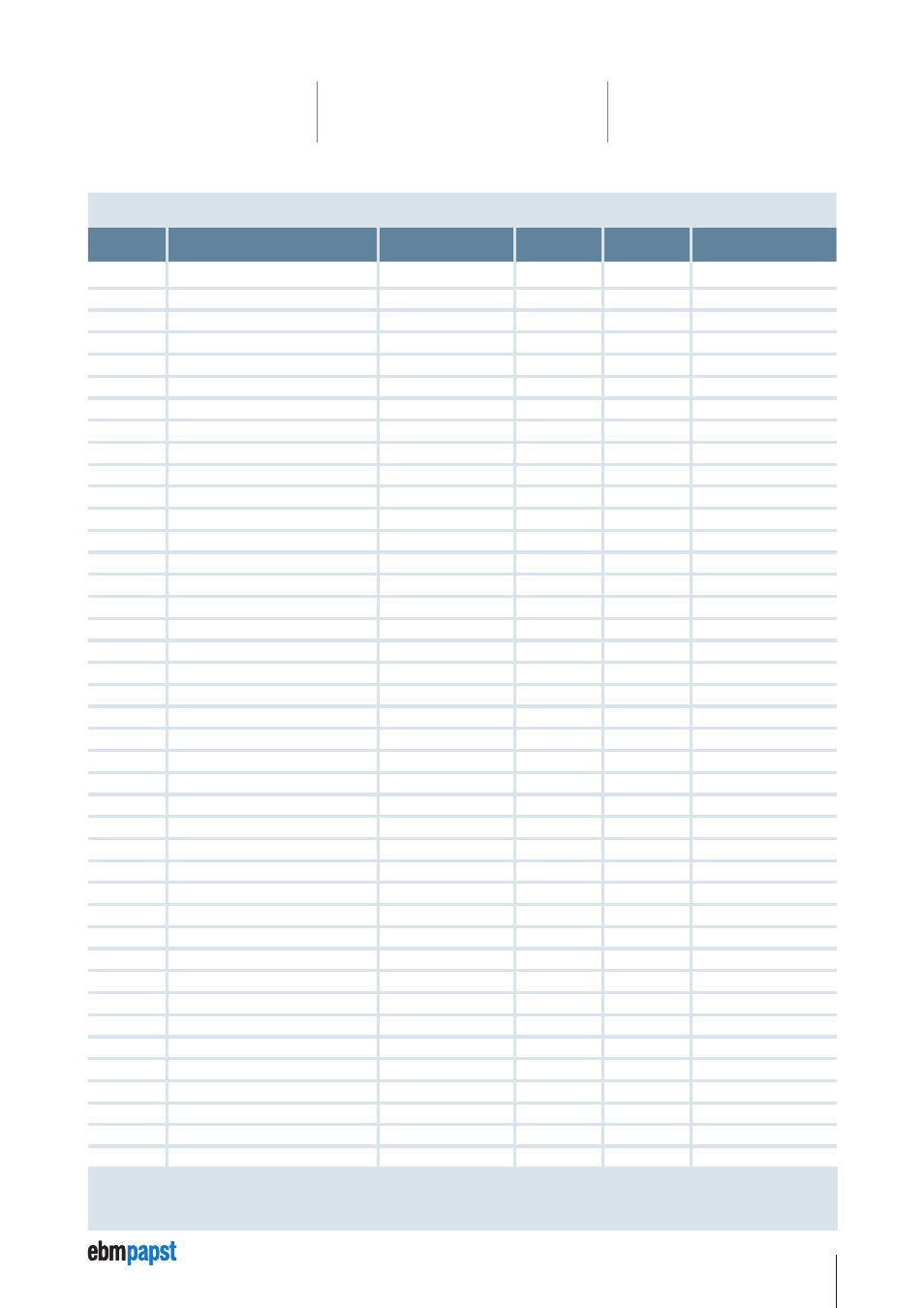
Parameterübersicht
Parameter
No. [hex]
Parameter
Name
Units
min.
max.
Speicherklasse
0x20
Speed controller KD (currently unused)
0
65535
appl value
0x21
K_ff
1/255
0
65535
appl func
0x22
Actual speed averaging
2^x [ms]
0
15
appl value
0x23
Resolution of the actual outputs
Pulse/mech.Umdrehung
0
100
appl value
0x24
Speed signal threshold
rpm
0
29999
appl value
0x25
Speed signal delta hysteresis
0
29999
appl value
0x26
FE_Current_X1
Digits
0
1023
appl func
0x27
FE_Current_X2
Digits
0
1023
appl func
0x28
FE_Current_X3
Digits
0
1023
appl func
0x29
FE_Current_Y0
%
0
100
appl func
0x2A
FE_Current_Y1
%
0
100
appl func
0x2B
FE_Current_Y2
%
0
100
appl func
0x2C
FE_Current_Y3
%
0
100
appl func
0x2D
FE_Current_Y4
%
0
100
appl func
0x2E
Current_X1_Hyst
Digits
0
1023
appl func
0x2F
Current_X2_Hyst
Digits
0
1023
appl func
0x30
Current_X3_Hyst
Digits
0
1023
appl func
0x31
Current error
%
0
100
appl func
0x32
Current signal threshold
10 mA
0
32767
appl value
0x33
Current signal delta hysteresis
10 mA
0
65535
appl value
0x34
Current time constant
ms
1
5000
appl value
0x35
Current gating time
ms
0
5000
appl value
0x36
Reversing threshold
0
29999
appl value
0x37
Reversing threshold delta hysteresis
rpm
0
29999
appl value
0x38
I_Max_driving_Rechts
10 mA
0
65535
appl value
0x39
I_Max_driving_Links
10 mA
0
65535
appl value
0x3A
I_Max_braking_Rechts
10 mA
0
65535
appl value
0x3B
I_Max_braking_Links
10 mA
0
65535
appl value
0x3C
Hold gain KP_H
1/256
0
65535
appl value
0x3D
PWM/Freq: Lower frequency limit
Hz
25
15000
appl func
0x3E
PWM/Freq: Upper frequency limit
Hz
25
15000
appl func
0x3F
Max. positioning speed
rpm
0
29999
appl value
0x40
Coasting, cw
1/65535 revolutions
0
65535
appl value
0x41
Coasting, cw
revolutions
–32768
32767
appl value
0x42
Coasting ccw
1/65535 revolutions
0
65535
appl value
0x43
Coasting ccw
revolutions
0–32768
32767
appl value
0x44
Distance
1/65535 revolutions
0
65535
appl value
0x45
Distance
revolutions
–32768
32767
appl value
0x46
Positive positioning window*
1/65535 revolutions
0
65535
appl value
0x47
Positive positioning window*
revolutions
0
65535
appl value
0x48
Negative positioning window*
1/65535 revolutions
0
65535
appl value
* Parameter 46 + 47 (positive) = 1000
Parameter 48 + 49 (negativ) = 500
Target position = 50000
Here “Position reached” = ACTIVE should be set, if
Actual position > 49500 and actual position < 51000