29 operating mode 73: speed setpoint pwm, distance, 7 parameterisation of the operating modes – ebm-papst ECI-63.XX-K4 User Manual
Page 65
65
7 Parameterisation of the Operating Modes
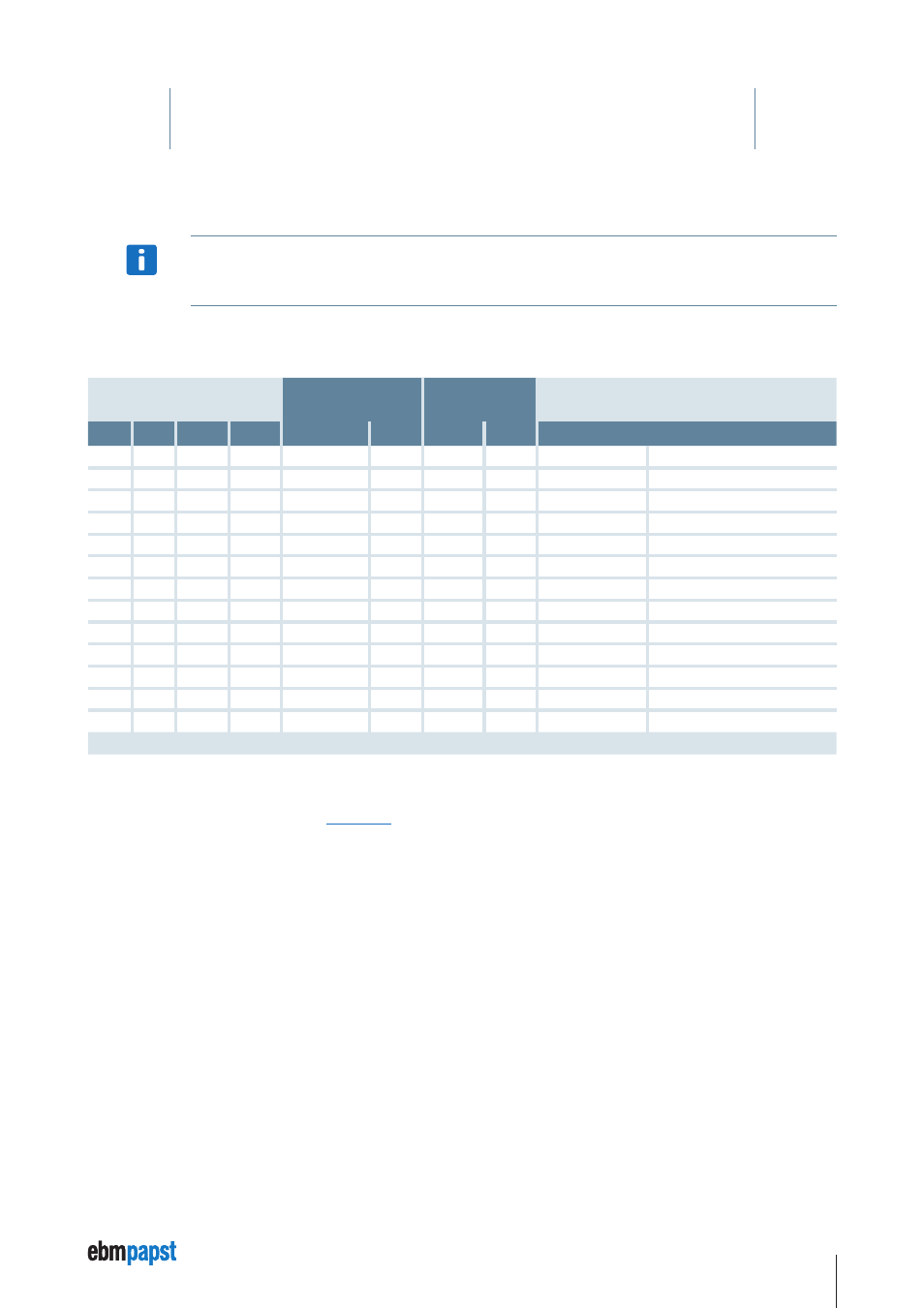
7.29 Operating mode 73: Speed setpoint PWM, distance
NOTe
In order for the parameter to function, KP_H must be > 0.
Function IN 1:
Input for PWM signal.
Function IN 2:
Travel distance; the distance increases with each high flank (x); displacement = x*distance.
Speed
Current limit
IN A
IN B
IN 1
IN 2
Direction
Value
Type
Value
Function
Comment
0
0
x
x
-
0
-
-
Free-wheeling
No braking, no current feed
1
0
PWM
x
pos
PWM
S
P
N control
1
0
PWM
x
pos
PWM
S
P
N control
1
0
PWM
x
pos
PWM
S
P
N control
1
0
PWM
x
pos
PWM
S
P
N control
0
1
PWM
x
neg
PWM
S
P
N control
0
1
PWM
x
neg
PWM
S
P
N control
0
1
PWM
x
neg
PWM
S
P
N control
0
1
PWM
x
neg
PWM
S
P
N control
1
1
PWM
0
-
0
S
P
Stop
Stopping
1
1
PWM
0
-
0
S
P
Stop
Stopping
1
1
PWM
0 -> 1
-
PWM
S
P
Distance
Positioning
1
1
PWM
0 -> 1
-
PWM
S
P
Distance
Positioning
Distance =
Parameter 44 + 45; relative distance with plus/minus sign. Positive distances are travelled in a clockwise direction.
Travel distance only if KP_H > 0
For further information,
.
Stop control =
If KP_H > 0; brake and stop in the current position on changeover to IN A = IN B = 1 + Coasting rh, lh.
If KP_H = 0; brake and stop on changeover to IN A = IN B = 1, run speed to 0.
S = Static
P = Parameter
F = Freeze
D = Dynamic
x = Arbitrary value