Rockwell Automation 1336Z SPIDER - FRN 2.xxx-5.xxx User Manual
Page 134
7–62
Programming
Step Logic
[SL0 Logic Jump]
– Firmware 5.001 & later
[SL1 Logic Jump]
[SL2 Logic Jump]
[SL3 Logic Jump]
[SL4 Logic Jump]
[SL5 Logic Jump]
[SL6 Logic Jump]
When the logic in this parameter is true, the program will
jump to the step specified by [SLx Step Jump]. The SL1
and SL2 inputs are designated in [TB3 Term xx Sel].
The logic which refers to time is also for encoder or pulse
counts. Time can be replaced with counts when using the
encoder and pulse inputs.
When using “Time and SLx” or “Time not SLx” the time or
counts need to elapse before the logic input will be
checked.
Parameter Number 336, 342, 348, 354, 360, 366, 372
Parameter Type
Read and Write
Factory Default
“Do Not Step”
Units
Display Drive
“Skip Step” 0
“Step On Time” 1
“SL1 In True” 2
“SL2 In True” 3
“SL1 In False” 4
“SL2 In False” 5
“Any SL True” 6
“All SL True” 7
“No SL True” 8
“SL1 not SL2” 9
“SL2 not SL1” 10
“Time and SL1” 11
“Time and SL2” 12
“Time not SL1” 13
“Time not SL2” 14
“Do Not Step” 15
[SL0 Step Jump]
– Firmware 5.001 & later
[SL1 Step Jump]
[SL2 Step Jump]
[SL3 Step Jump]
[SL4 Step Jump]
[SL5 Step Jump]
[SL6 Step Jump]
This parameter sets which step to jump to if [SLx Logic
Step] is true. “End Stop 1” uses the settings of [Stop Select
1]. “End Fault” causes the drive to stop with a F69 Step
Logic fault.
Parameter Number 337, 343, 349, 355, 361, 367, 373
Parameter Type
Read and Write
Factory Default
“Jump to 0”
Units
Display Drive
“Jump to 0” 0
“Jump to 1” 1
“Jump to 2” 2
“Jump to 3” 3
“Jump to 4” 4
“Jump to 5” 5
“Jump to 6” 6
“End Stop 1” 7
“End Stop 2” 8
“End Fault” 9
[SL0 Step Setting]
– Firmware 5.001 & later
[SL1 Step Setting]
[SL2 Step Setting]
[SL3 Step Setting]
[SL4 Step Setting]
[SL5 Step Setting]
[SL6 Step Setting]
“Reverse” – when set, the drive will run in reverse during
the step. Otherwise it runs forward.
“SL Output” – when set, the associated [CRx Out Select]
will turn on (if set to “Step Logic”).
“Acc/Dec 2” – when set, the drive will use [Accel Time 2]
and [Decel Time 2] for speed changes during the step.
“Encoder/Puls” – when bit is off, the Encoder input is used.
When set, the Pulse input is used. For more information
refer to [SLx Encoder Cnts]. To use Encoder/Pulse counts,
the logic is set to one of the time functions. The [SLx Time]
must be set to 0, then set the desired count difference in
[SLx Encoder Cnts]. The counts are signed when used for
the encoder. The absolute value of the counts is used for
the pulse counts.
Parameter Number 338, 344, 350, 356, 362, 368, 374
Parameter Type
Read and Write
Factory Default
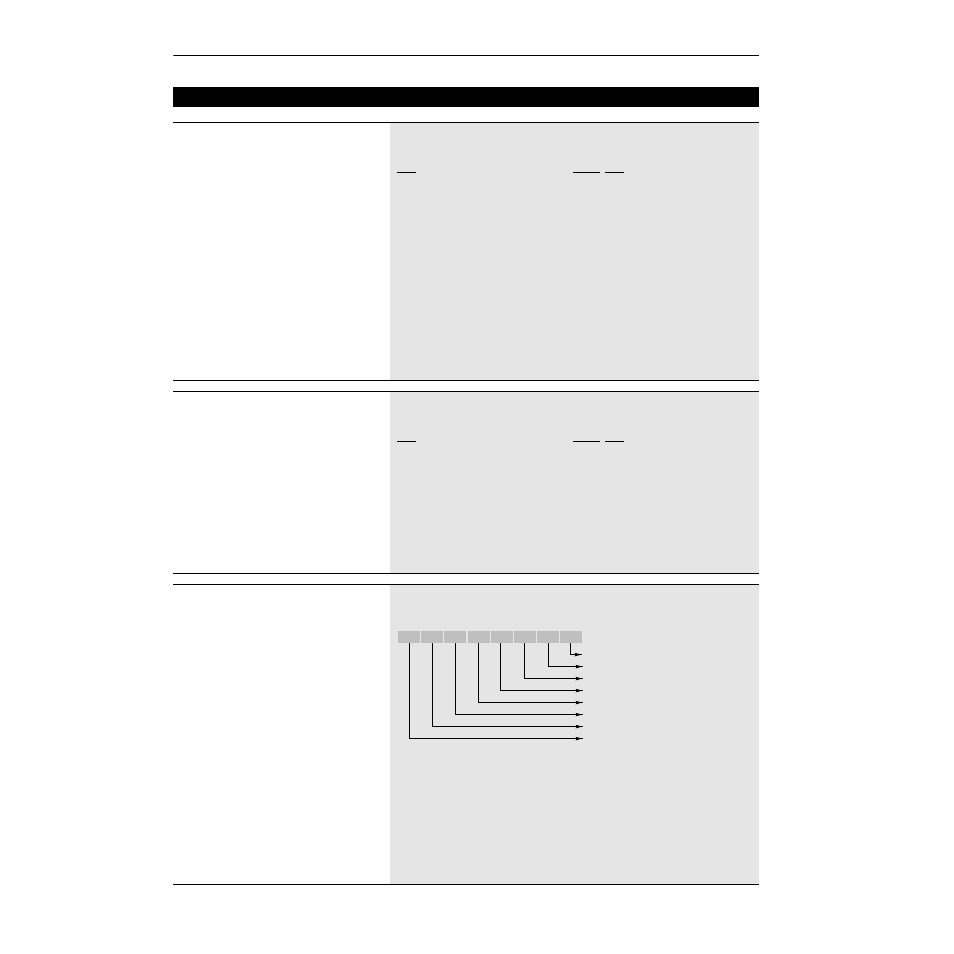
xxxx0000
A Status description (bit ENUM) is displayed on line 1 (except Series A HIMs below version 3.0).
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reverse
SL Output
Acc/Dec 2
Encoder/Puls
Not Used
Not Used
Not Used
Not Used