Pi status, Pi ref select, Process pi – Rockwell Automation 1336Z SPIDER - FRN 2.xxx-5.xxx User Manual
Page 125
Programming
7–53
[PI Status]
This parameter displays the status of the Process PI
regulator.
Parameter Number
214
Parameter Type
Read Only
Factory Default
None
[PI Ref Select]
The source of the PI reference is selected with this
parameter. The value from the selected reference is the
“set point” for the Process PI regulator.
The drive is capable of responding to a loss of the 4-20
mA signal used as either a PI reference or PI feedback.
Response to loss of 4-20 mA signal is controlled by
programming and requires the following:
a) [Speed Control] must be set to “Process PI”
and
b) Either [PI Ref Select] or [PI Fdbk Select] must be set to
“4-20 mA.”
If both of the above conditions are met, the signal loss
response is controlled by the setting of [4-20 mA Loss Sel].
If this parameter is set to “Stop/Fault,” loss of input will
cause the drive to stop and issue a Hertz Err Fault. Loss
of input while any other setting of [4-20 mA Loss Sel] is
chosen will cause the drive to activate the alarm bit (bit 6
of [Drive Status] and bit 13 of [Drive Alarm]) and output
programmed [Minimum Freq].
Signal loss protection is offered for the 2-10V input.
Parameter Number
215
Parameter Type
Read/Write
Factory Default
“Preset 1”
Units
Display Drive
“Use Last” 0
“Analog In 0” 1
“Analog In 1” 2
“Analog In 2” 3
“Pulse Ref” 4
Refer to [Pulse In Scale] Value
“MOP” 5
“Adapter 1-6” 6-11
“Preset 1-7” 12-18
“Encoder” 19 Refer to [Encoder PPR] Value
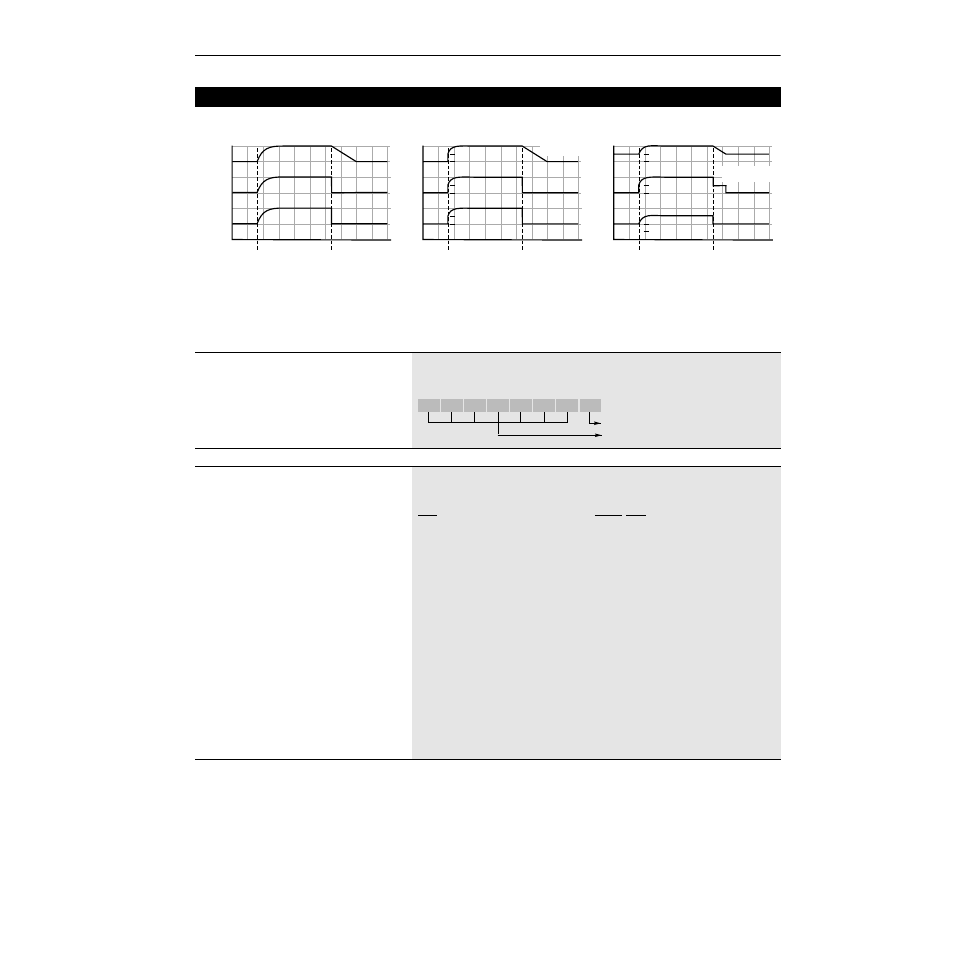
Diagram 1
Time
Enable
PI
Output
Command
Output
Freq.
Disable
0
24
21
27
30
18
15
12
9
6
3
Enable PI output integrates from zero – drive ramps
to regulated frequency.
Disable PI output is forced to zero – drive ramps to
unregulated frequency.
Enable PI output steps to preload and integrates
from there – drive steps to preload and
ramps from there.
Disable PI output is forced to zero - drive ramps to
unregulated frequency.
Enable PI output integrates from preload – drive
ramps from preload.
Disable PI output is held at preload - drive ramps to
unregulated speed (min. preload).
Note:
Drive will step output equal to preload on
Diagram 2
Enable
Disable
0
24
21
27
30
18
15
Preload
12
9
6
3
Diagram 3
Enable
Disable
0
24
21
27
30
18
15
12
9
6
3
Preload
Preload
Preload at Start
Preload at Start
Preload
Feed forward effect for
more dynamic
Better response for
well defined
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Enabled
Spares