Rockwell Automation 284E ArmorStart with EtherNet/IP - User Manual User Manual
Page 261
Rockwell Automation Publication 280E-UM001B-EN-P - July 2012
261
Accessories Chapter 12
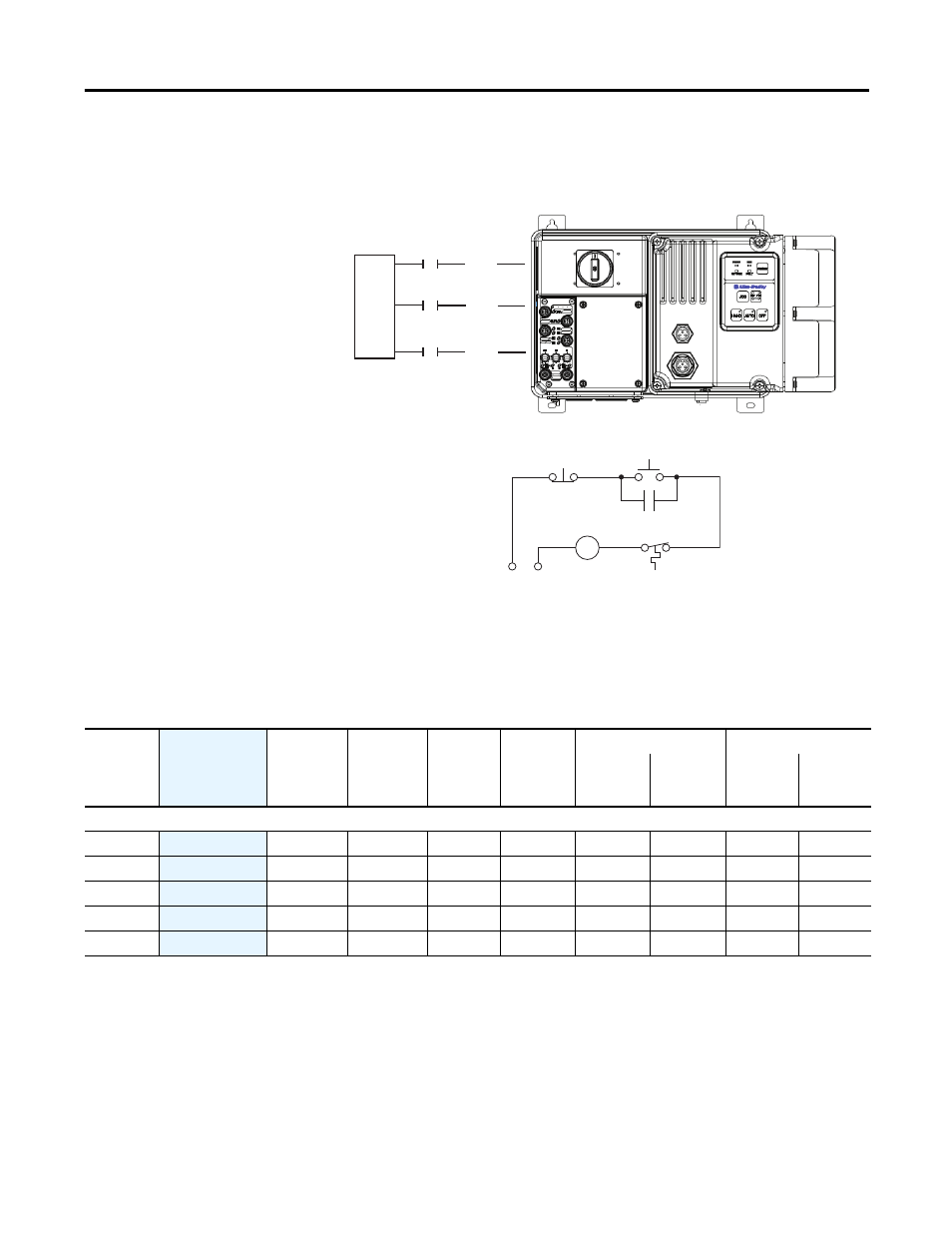
Recommended thermostat control wiring to prevent dynamic brake overheating.
Figure 93 - Thermostat Control Wiring
Sensorless Vector Control (SVC) Recommended Dynamic Brake
Modules for Option DB1 (IP67 Resistor)
➊ Drive rating and DB part numbers are not interchangeable. Only use specified resistor. Customer is responsible to evaluate if
performance meets application requirement.
Note:
Duty Cycle listed is based on full speed to zero speed deceleration. For
constant regen at full speed, duty cycle capability is half of what is listed.
Application Type 1 represents maximum capability up to 100% braking torque
where possible.
3-Phase
Power
R (L1)
S (L2)
T (L3)
(M)
Contactor
Power On
Power Source
DB Resistor Thermostat
Power Off
M
M
Drive and
Motor Size
kW
Cat. No.
➊
Resistance
Ohms ± 5%
Continuous
Power kW
Max Energy
kJ
Max Braking
Torque % of
Motor
Application Type 1
Application Type 2
Braking
Torque % of
Motor
Duty
Cycle %
Braking
Torque % of
Motor
Duty
Cycle %
380…480 Volt AC Input Drives
0.37 (0.5)
284R-360P500-M*
360
0.086
17
305%
100%
47%
150%
31%
0.75 (1)
284R-360P500-M*
360
0.086
17
220%
100%
23%
150%
15%
1.5 (2)
284R-360P500-M*
360
0.086
17
110%
100%
12%
110%
11%
2.2 (3)
284R-120P1K2-M*
120
0.26
52
197%
100%
24%
150%
16%
4 (5)
284R-120P1K2-M*
120
0.26
52
124%
100%
13%
124%
10%