Rockwell Automation 284E ArmorStart with EtherNet/IP - User Manual User Manual
Page 232
232
Rockwell Automation Publication 280E-UM001B-EN-P - July 2012
Chapter 10 Troubleshooting
Speed command source or value
is not as expected.
None
• Verify Parameter 102 (Commanded Freq).
• Check Parameter 112 (Control Source) for the proper Speed Command.
Programming is preventing the
drive output from exceeding
limiting values.
None
Check Parameter 135 (Maximum Freq) to insure that speed is not limited by programming.
Torque performance does not
match motor characteristics.
None
• Set motor nameplate full load amps in Parameter 226 (Motor NP FLA).
• Use Parameter 227 (Autotune) to perform Static Tune or Rotate Tune procedure.
• Set Parameter 225 (Torque Perf Mode) to Option 0 (V/Hz).
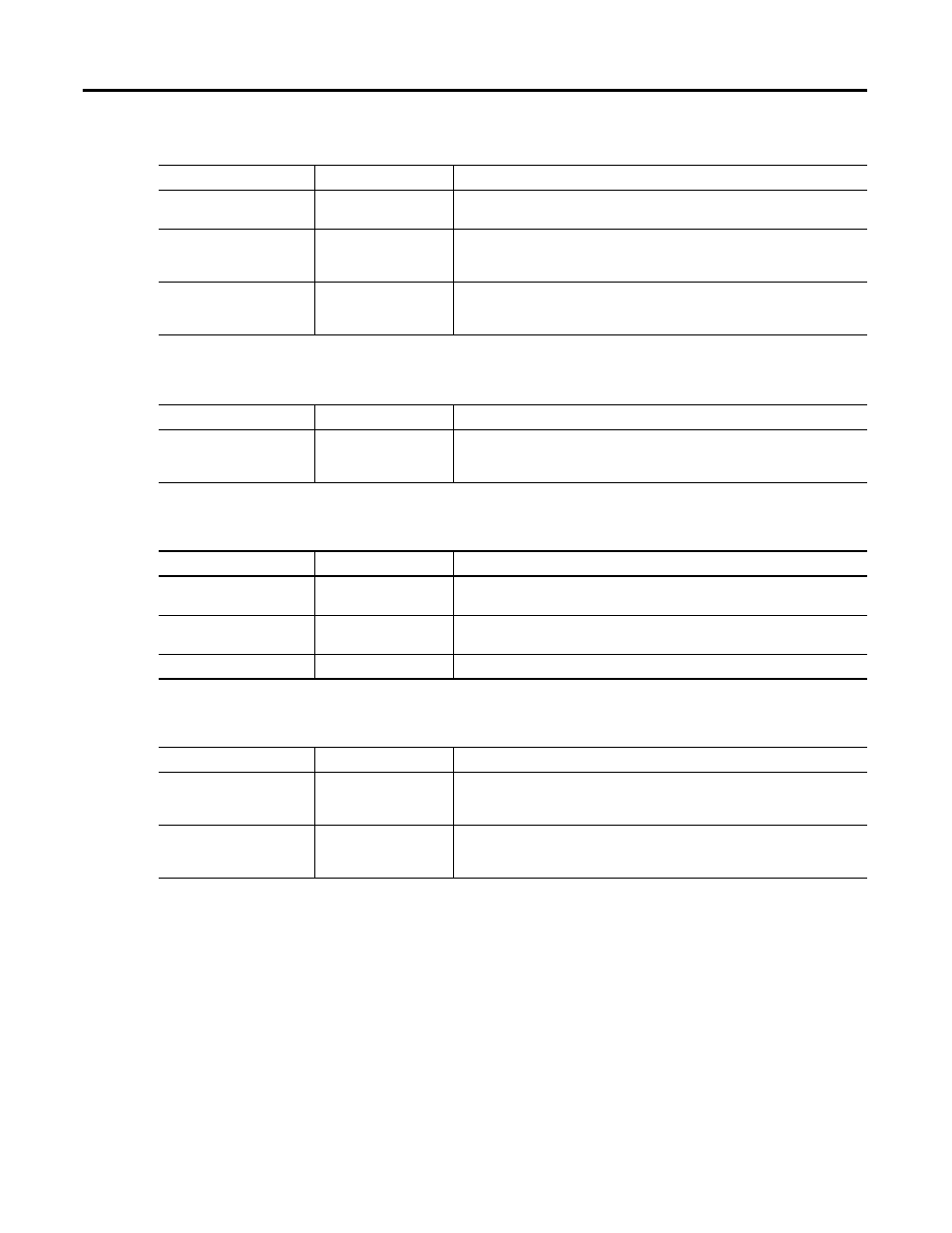
Table 42 - Motor and/or Drive Will Not Accelerate to Commanded Speed
Cause(s)
Indication
Corrective Action
Table 43 - Motor Operation is Unstable
Cause(s)
Indication
Corrective Action
Motor data was incorrectly
entered.
None
1. Correctly enter motor nameplate data into Parameters 131, 132, and 133.
2. Enable Parameter 197 (Compensation).
3. Use Parameter 184 (Boost Select) to reduce boost level.
Table 44 - Drive Will Not Reverse Motor Direction
Cause(s)
Indication
Corrective Action
Digital input is not selected for
reversing control.
None
Check Parameters 151…154 (Digital In x Sel). Choose correct input and program
for reversing mode.
Motor wiring is improperly
phased for reverse.
None
Switch two motor leads.
Reverse is disabled.
None
Check Parameter 195 (Reverse Disable).
Table 45 - Drive Does Not Power Up
Cause(s)
Indication
Corrective Action
No input power to drive.
None
Check the power circuit.
• Check the supply voltage.
• Check all fuses and disconnects.
Jumper between I/O Terminals P2
and P1 not installed and/or DC
Bus Inductor not connected.
None
Install jumper or connect DC Bus Inductor.