Rockwell Automation 20-COMM-ER 20-COMM-ER Dual-Port EtherNet/IP Communication Adapter User Manual User Manual
Page 175
Rockwell Automation Publication 20COMM-UM015B-EN-P - July 2013
175
Adapter Parameters Appendix B
26
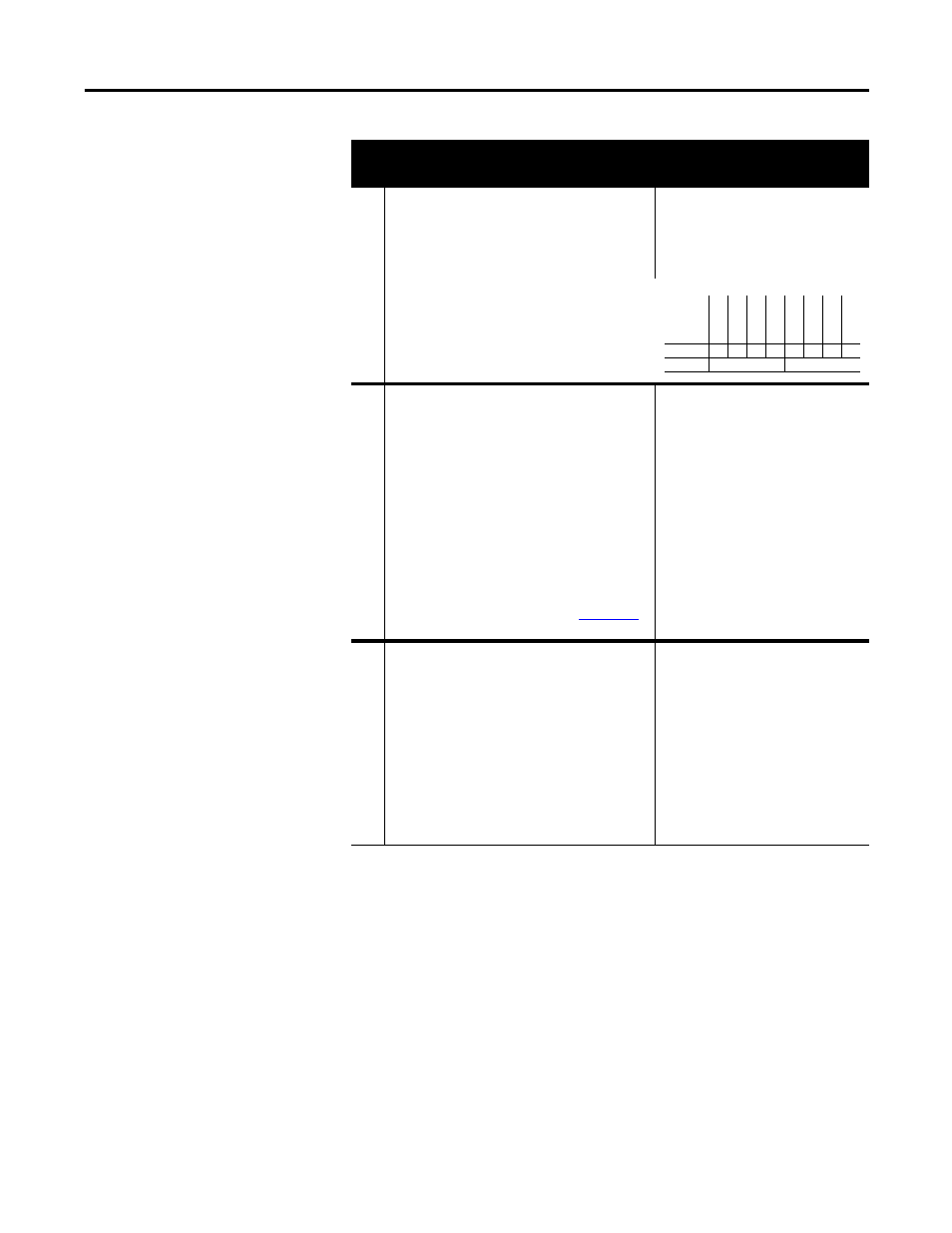
[DPI I/O Act]
Displays the I/O that the adapter is actively
transmitting. The value of this parameter will
usually be equal to the value of Parameter 25 -
[DPI I/O Cfg].
Default:
xxx0 0001
Bit Values:
0 = I/O Disabled
1 = I/O Enabled
Type:
Read Only
27
[Flt Cfg Logic]
Sets the Logic Command data that is sent to the
drive if any of the following is true:
·
Parameter 23 - [Comm Flt Action] is set to ‘4’
(Send Flt Cfg) and I/O communication is
disrupted.
·
Parameter 24 - [Idle Flt Action] is set to ‘4’
(Send Flt Cfg) and the controller is idle.
·
Parameter 43 - [Peer Flt Action] is set to ‘4’
(Send Flt Cfg) and peer I/O communication is
disrupted.
The bit definitions will depend on the product to
which the adapter is connected. See
or the documentation for the drive being used.
Default:
0000 0000 0000 0000
Minimum:
0000 0000 0000 0000
Maximum:
1111 1111 1111 1111
Type:
Read/Write
Reset Required: No
28
[Flt Cfg Ref]
Sets the Reference data that is sent to the drive if
any of the following is true:
·
Parameter 23 - [Comm Flt Action] is set to ‘4’
(Send Flt Cfg) and I/O communication is
disrupted.
·
Parameter 24 - [Idle Flt Action] is set to ‘4’
(Send Flt Cfg) and the controller is idle.
·
Parameter 43- [Peer Flt Action] is set to ‘4’
(Send Flt Cfg) and peer I/O communication is
disrupted.
Default:
0
Minimum:
0
Maximum:
4294967295
Type:
Read/Write
Reset Required: No
Important: If the drive uses a 16-bit
Reference, the most significant word of
this value must be set to zero (0) or a
fault will occur.
Parameter
No. Name and Description
Details
Bit
Definition
Not
Used
Not
Used
Not
Used
Dat
alink
D
Dat
alink
C
Dat
alink
B
Dat
alink
A
Cm
d/Ref
Default
x
x
x
0 0 0 0 1
Bit
7 6 5 4 3 2 1 0