IAI America PCON-CY User Manual
Page 89
79
5. Operation Using I/O Signals
Full Servo Control Mode
The pulse motor is servo-controlled to reduce the holding current.
Although the specific level of current reduction varies in accordance with the actuator model, load condition, etc., generally
the holding current drops to around a half to one-fourth.
The servo remains on, so position deviation does not occur.
The actual holding current can be checked in the current monitor screen of the PC software.
Note that in a condition where external force is applied or depending on the stopped position, micro-vibration or noise may
occur.
Do not use this mode in applications where such micro-vibration or noise may be detrimental.
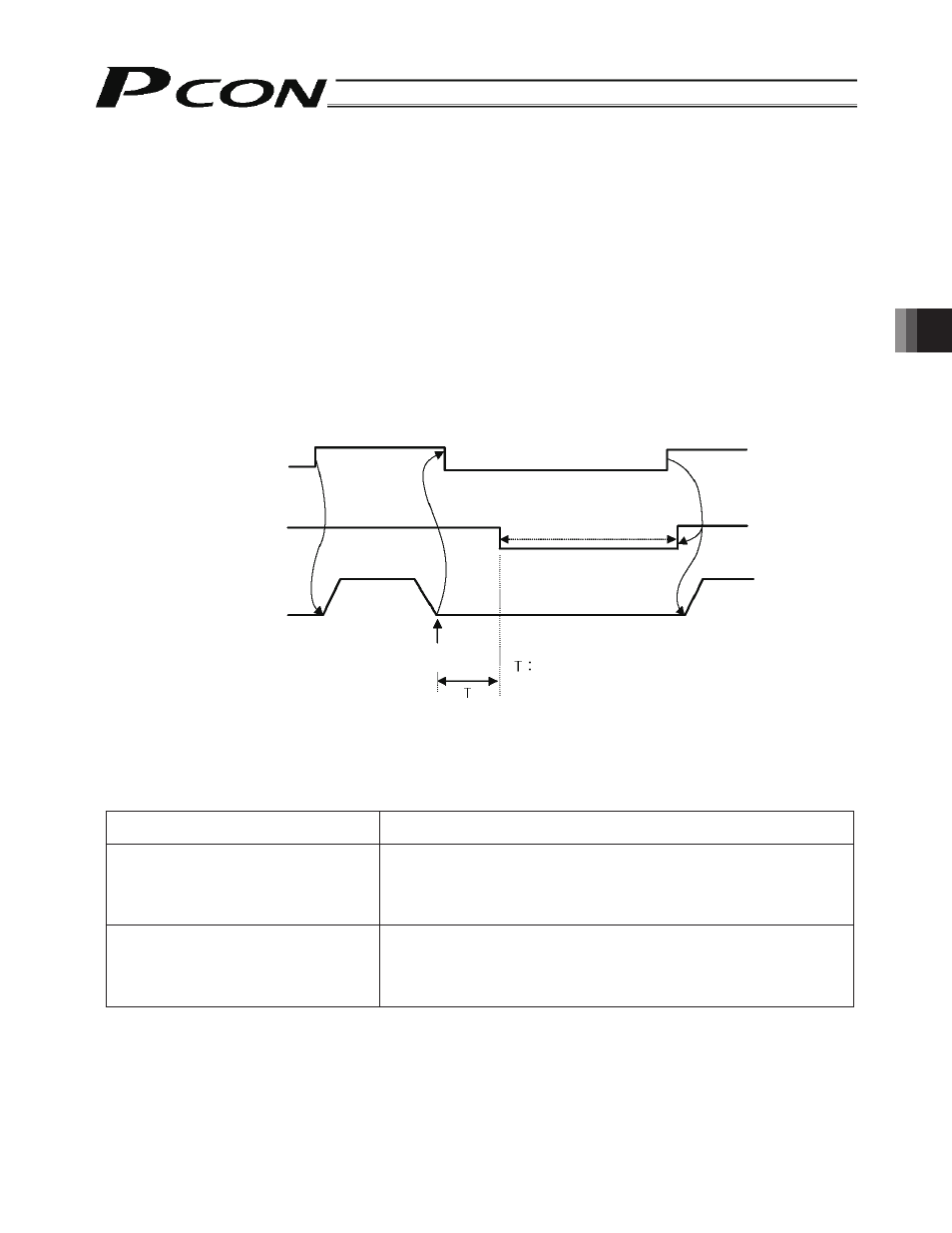
Automatic Servo-off Mode
The servo automatically turns off after elapse of a specified time following the completion of positioning. (Since no holding
current is required, power consumption decreases.)
When the PLC issues the next move command, the servo will turn on again and the actuator will start moving.
* Since the servo turns off temporarily, slight position deviation may occur.
Do not use this mode at a standby position where such position deviation may be detrimental.
In the standard type, the positioning complete signals (PE0, PE1, PE2) turn OFF.
However, you can set the applicable parameter to keep these signals ON in conditions where allowing the positioning
complete signals to turn OFF will cause problems due to the sequence circuit of the PLC.
Setting of Parameter No. 39
(Positioning complete signal output mode)
Positioning complete signal (PE0, PE1, PE2) state
0 [PEND]
When the servo is off, the positioning complete signal turns OFF
unconditionally.
Even when the next move command is issued and the servo turns on again,
the signal will remain OFF because the actuator has already started moving
to the next target position.
1 [INP]
Even when the servo is off, the positioning complete signal turns ON if the
current position is close enough to the target position, or specifically inside
the range corresponding to the value set in the “Positioning band” field of
the position table. The signal turns OFF if the current position is outside this
range.
(Note) The factory setting is “0.”
Move command
Servo status
Actuator movement
Servo on
Automatic servo-off mode
(The green LED blinks.)
Delay time after completion of positioning until
the servo turns off (sec)
This delay time is set by a parameter.
Target position