IAI America PCON-CY User Manual
Page 68
58
5. Operation Using I/O Signals
z Normal Operating Procedure
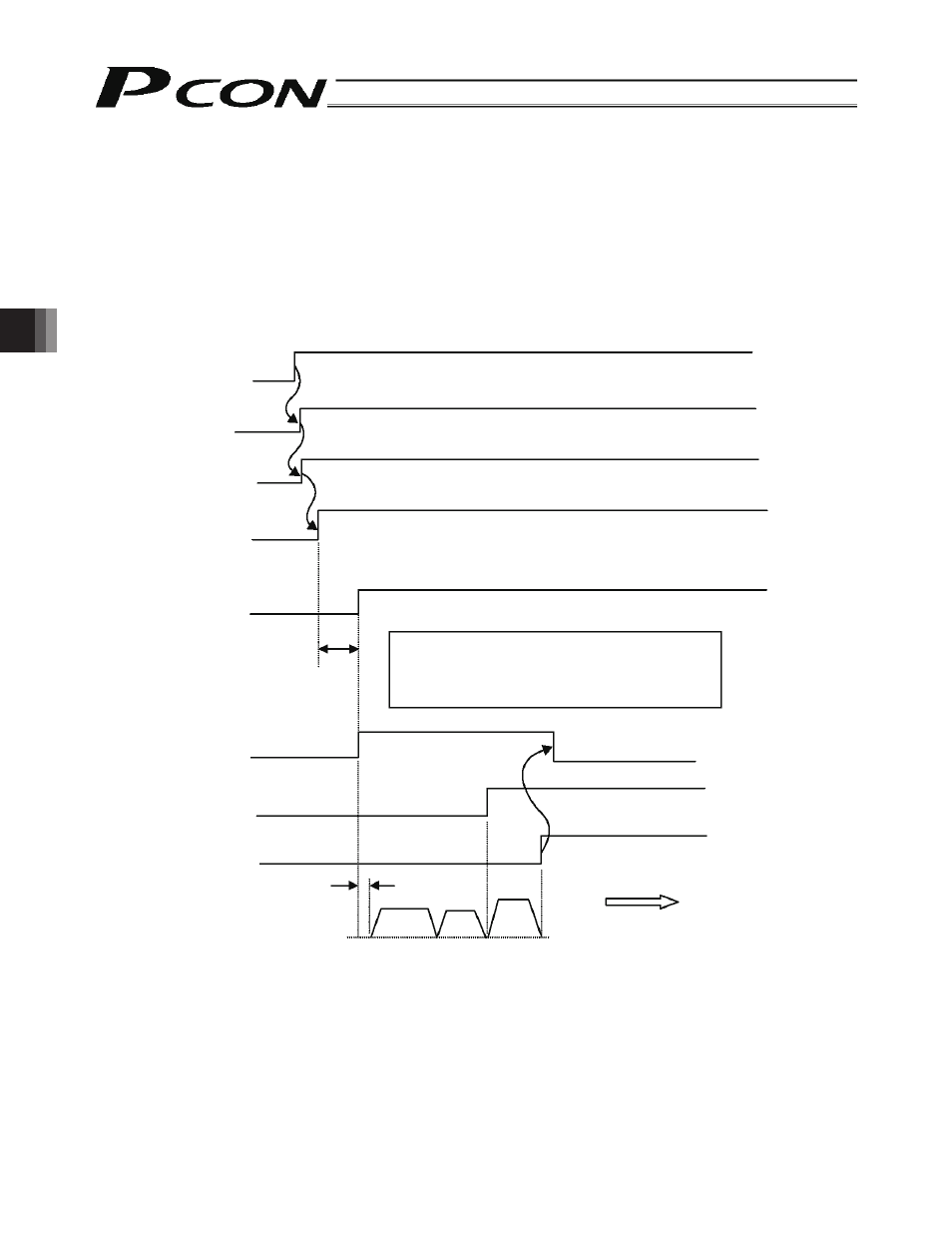
The operating procedure in a normal condition is explained below.
[1] Confirm that the slider or rod is not contacting a mechanical end or that the work is not contacting any peripheral
equipment.
[2] Cancel the emergency stop or connect the motor drive power.
[3] Supply the 24-VDC I/O power.
[4] Supply the 24-VDC controller power.
[5] Input a servo-on signal from the PLC.
[6] First, input a rear end move command signal from the PLC (to cause the actuator to stand by at the rear end).
[7] Start automatic operation.
Safety circuit status
Supply of 24-VDC
I/O power
Supply of 24-VDC
controller power
Servo-on input
(SON)
SV lamp
(front panel)
Emergency stop cancelled
Green
Max. 170 msec
Input a move command following a delay time of at
least 170 msec after a SON input. (If the delay time
is shorter, the move command will be ignored.)
Rear end move
command input (ST0)
Homing complete
output (HEND)
Rear end positioning
complete output (PE0)
Power-
on pos
ition
Mechanical end
Home position
Rear end
Start of continuous
operation
Max. 6 msec