IAI America PCON-CY User Manual
Page 118
108
7. T
roubleshooting
z A Servo Error Occurred while the ROBO Gripper Was Moving.
Cause:
The work was not positioned properly and a finger attachment contacted the work in the positioning mode.
Action:
Consider how much the work deviates and adjust the start position of push-motion operation, as well as the
thickness of the finger attachment (including buffer material), so that the work can be clamped properly in the
push-motion mode.
Before resetting the error, be sure to turn the open/close screw and loosen the finger attachments first, because
the feed mechanism may be locked.
Caution:
If the alarm is reset when the servo-on signal is disabled or while the servo-on signal is ON, the servo will
turn on.
Turning the open/close screw in this condition only results in the screw returning to the original position, and
the feed mechanism remains locked. Therefore, the alarm will generate again the next time a move
command is issued.
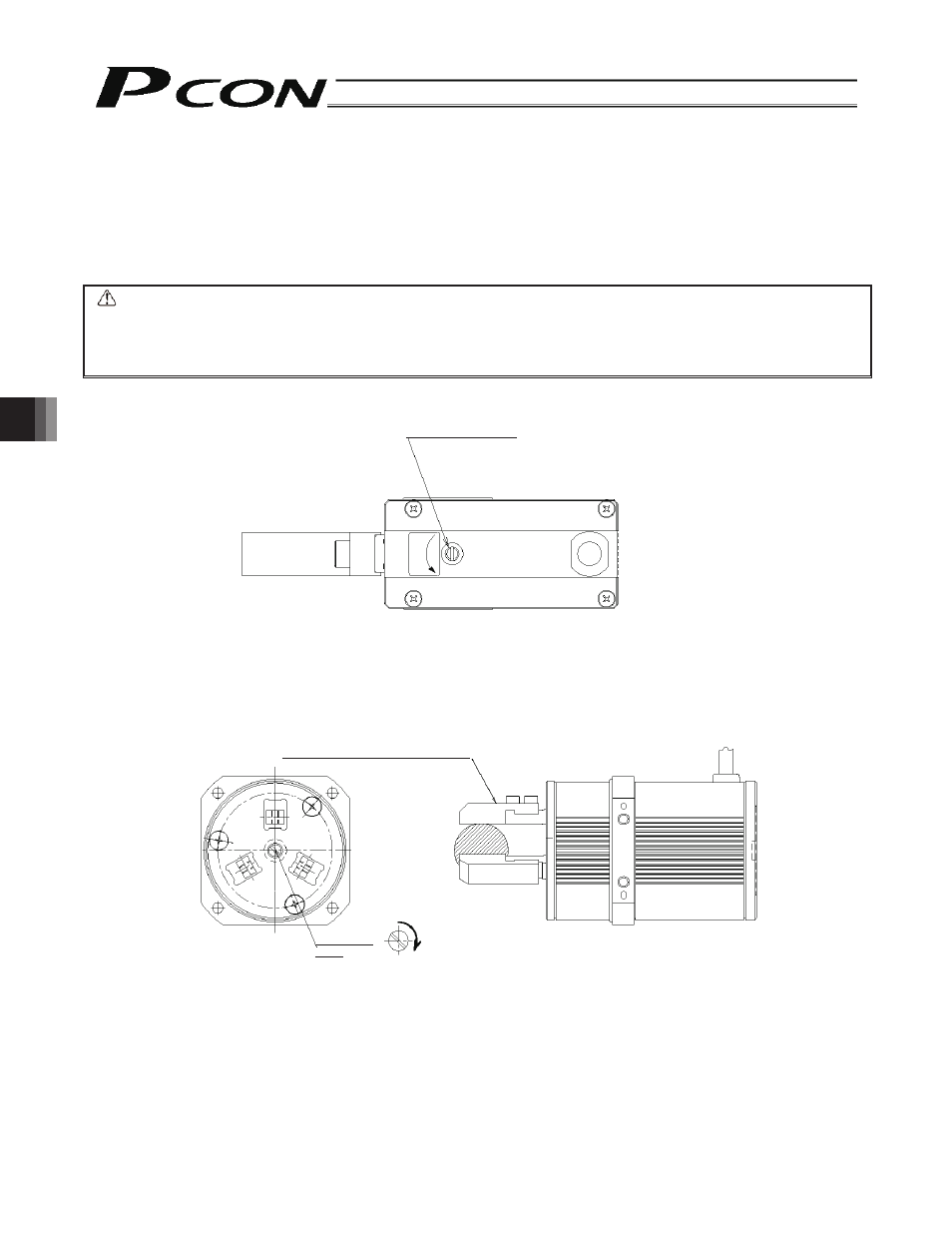
[Two-finger type]
[Three-finger type]
Remove one of the finger attachments and take out the work, and then turn the open/close screw clockwise.
OPEN
Open/close screw
Turn counterclockwise using a flat-head screwdriver.
Remove one of the finger attachments.
Open/close
screw
Opening direction
Turn clockwise.