4 homing – IAI America PCON-CY User Manual
Page 60
50
5. Operation Using I/O Signals
5.2.4 Homing
This controller adopts an incremental position detector (encoder), so once the power is cut off, the mechanical coordinates will
be lost.
Accordingly, homing must be performed to establish the initial mechanical coordinate every time the power is turned on.
To perform homing, input a rear end move command (ST0).
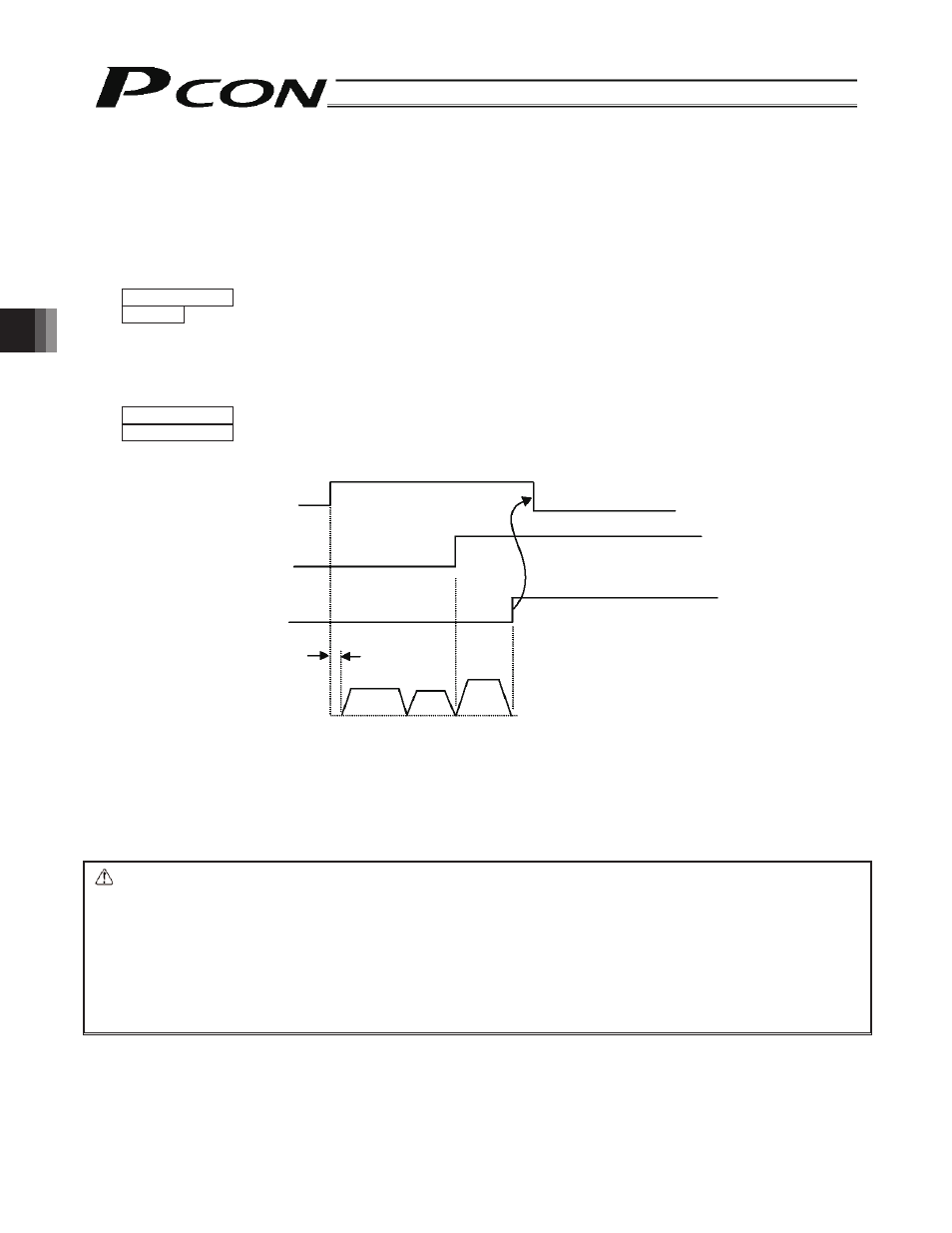
Operation timings
PLC processing 1:
The rear end move command signal (ST0) turns ON when the start button is pressed.
Operation:
[1]
The actuator starts moving toward the mechanical end on the home side.
[2]
After contacting the mechanical end, the actuator reverses its direction and temporarily
stops at the home position.
→ The homing complete signal (HEND) turns ON.
[3]
The actuator moves toward the rear end, and stops at the rear end.
→ The rear end detection output (LS0) turns ON.
PLC processing 2:
The rear end move command signal (ST0) turns OFF.
PLC processing 3:
The actuator starts continuous operation.
Caution:
Take note of the following points regarding homing:
[1]
Confirm that no obstacle exists between the actuator and the rear end.
[2]
If an obstacle exists between the actuator and the rear end, move the actuator toward the front end and
remove the obstacle. The controller accepts a front end move command prior to homing to
accommodate the aforementioned condition.
In this case, the actuator moves forward at the homing speed and once the mechanical end is reached,
the front end detection output (LS1) will turn ON.
This LS1 signal should be recognized as a tentative signal.
[3]
Do not input an intermediate move command. (Even if an intermediate move command is input, it will
be ignored.)
Rear end move
command input (ST0)
Homing complete
output (HEND)
Rear end detection
output (LS0)
Power-
on pos
ition
Mechanical end
Home position
Rear end
Max. 6 msec
[1]
[2]
[3]