IAI America PCON-CY User Manual
Page 64
54
5. Operation Using I/O Signals
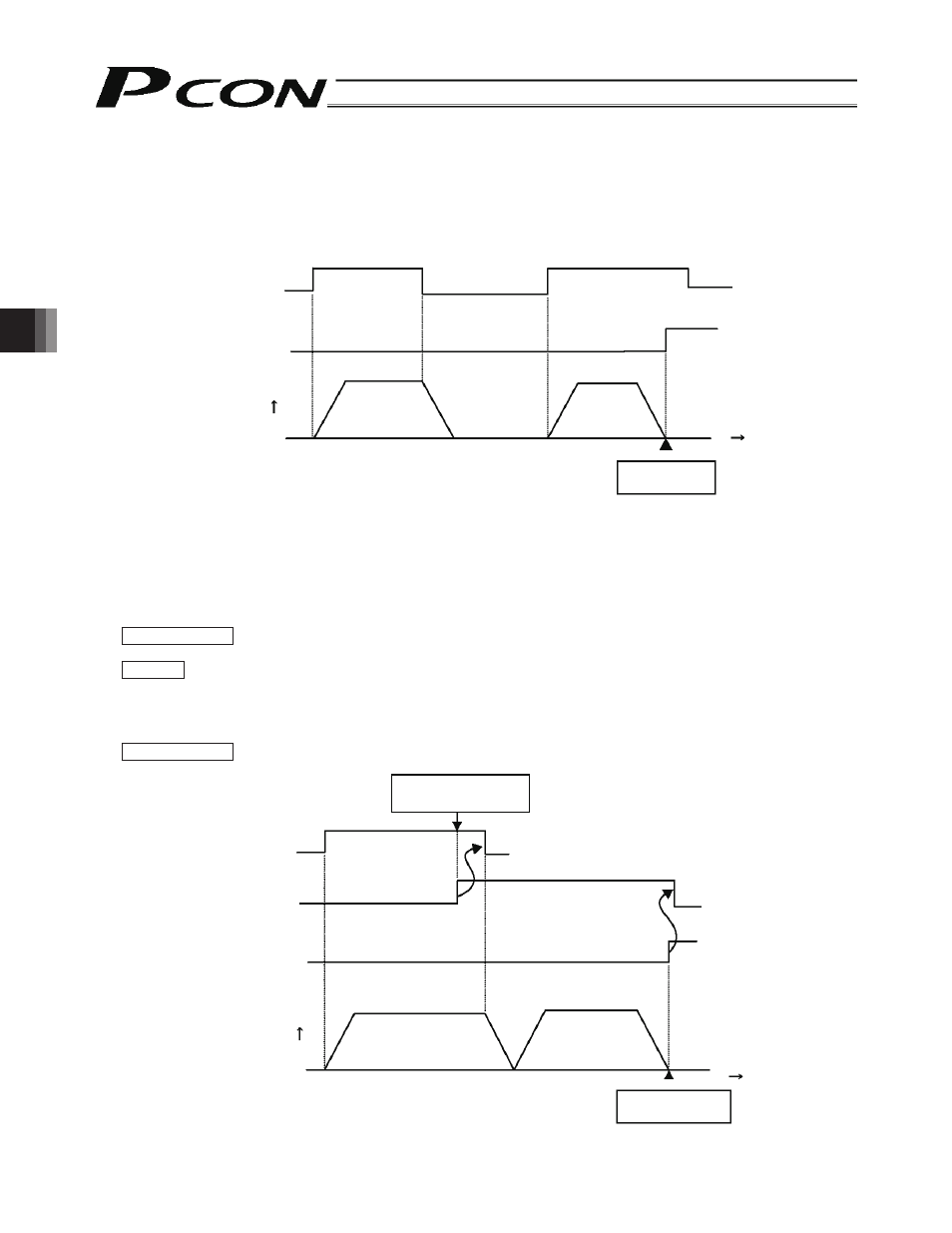
Front end move
command input (ST1)
Front end detection
output (LS1)
Speed
Time
Moving Stopped Moving
Front end
z Pausing during Movement
Move commands are implemented based on signal levels. Accordingly, the actuator moves while the signal is ON, and
once the signal turns OFF, the actuator will decelerate to a stop and the operation will end.
If you want to pause the actuator as a secondary safety measure, turn the move command signals OFF.
(Example) Pausing the actuator while moving toward the front end
z Forced Return in Case of Emergency
The following example explains how to return the actuator to the standby position (rear end) after an emergency situation
occurred while the actuator was moving.
(Example) Return the actuator to the standby position (rear end) after an emergency situation occurred while the actuator
was moving toward the front end
Operation timings
PLC processing 1:
Upon occurrence of an emergency situation, the rear end move command signal (ST0) turns ON,
and then the front end move command signal (ST1) turns OFF.
Operation:
[1]
After the front end move command signal (ST1) turns OFF, the actuator decelerates to a
stop.
[2]
The actuator reverses its direction and starts moving toward the rear end.
[3]
When the actuator reaches the rear end, the rear end positioning complete output (PE0)
turns ON.
PLC processing 2:
The rear end move command signal (ST0) turns OFF.
Occurrence of
emergency situation
Front end move
command input (ST1)
Rear end move
command input (ST0)
Rear end detection
output (LS0)
Moving to + direction
Moving to - direction
Rear end
Time
Speed