5 positioning operation – IAI America PCON-CY User Manual
Page 73
63
5. Operation Using I/O Signals
Positioning
band [mm]
Position
[mm]
Speed
[mm/s]
Acceleration
[G]
Deceleration
[G]
Push
[%]
Rear end
Front end
Intermediate point
Comment
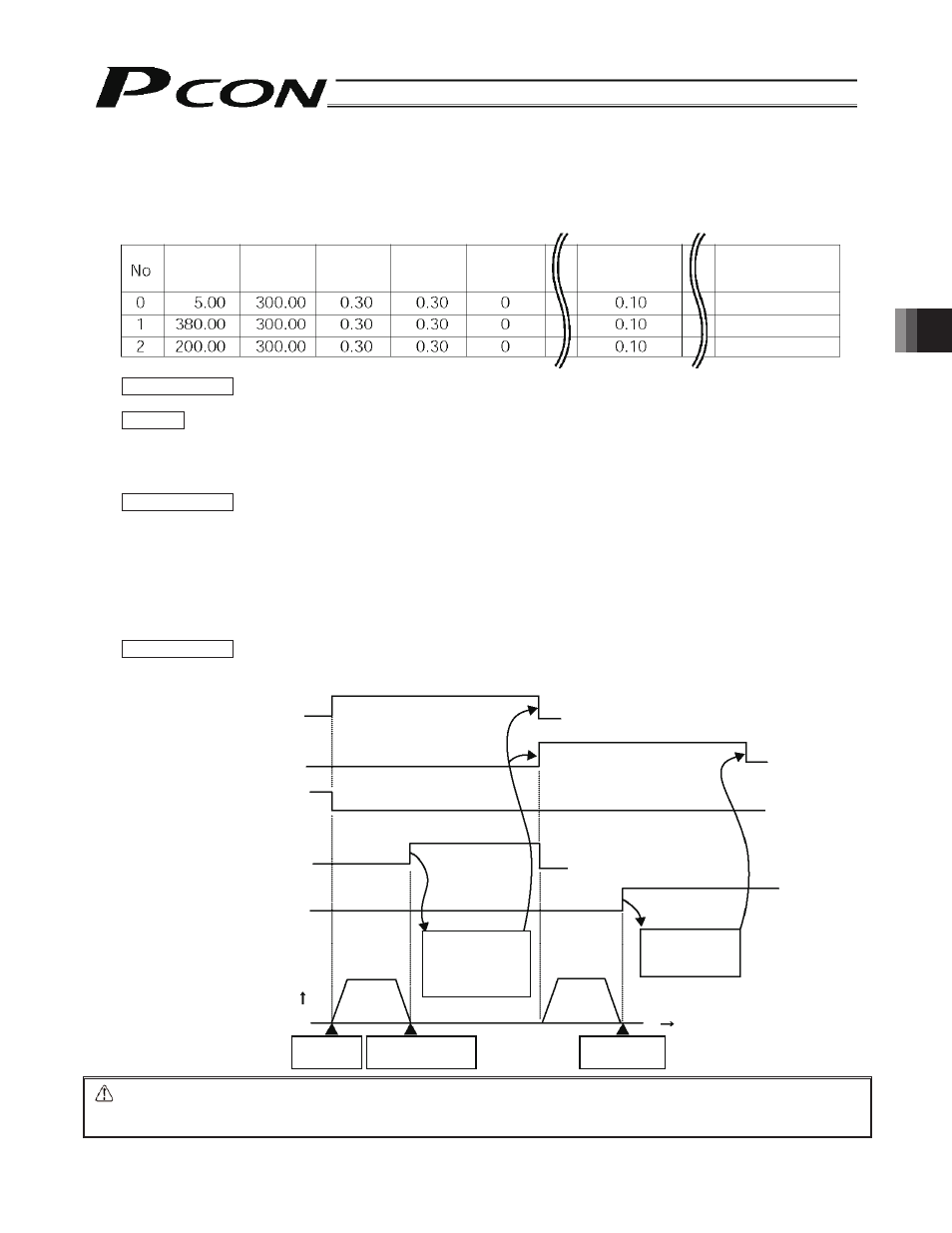
5.3.5 Positioning
Operation
This section explains how to move the actuator from the rear end to the intermediate point and then to the front end, by using
an actuator with a 400-mm stroke as an example.
Example of position table
Operation timings
PLC processing 1:
The rear end move command signal (ST0) and front end move command signal (ST1) turn OFF,
and the intermediate point move command signal (ST2) turns ON.
Operation:
[1]
The actuator starts moving toward the intermediate point, and the rear end positioning
complete output (PE0) turns OFF.
[2]
When the actuator reaches the position corresponding to 199.9 mm, the intermediate point
positioning complete output (PE2) turns ON.
[3]
After reaching the position corresponding to 200 mm, the actuator stops.
PLC processing 2:
When the intermediate point positioning complete output (PE2) turns ON, the sequence
processing is performed at the intermediate point.
Once the sequence processing is completed, the intermediate point move command signal (ST2)
turns OFF, and the front end move command signal (ST1) turns ON.
[4]
The actuator starts moving toward the front end, and the intermediate point positioning
complete output (PE2) turns OFF.
[5]
When the actuator reaches the position corresponding to 379.9 mm, the front end
positioning complete output (PE1) turns ON.
[6]
After reaching the position corresponding to 380 mm, the actuator stops.
PLC processing 3:
When the front end positioning complete output (PE1) turns ON, the sequence processing is
performed at the front end.
Once the sequence processing is completed, the front end move command signal (ST1) turns OFF.
Caution:
Design a ladder sequence circuit where only one move command signal turns ON at a given time. If two or
more signals are input simultaneously, the signals will be processed according to the set priorities.
Priorities: [1] Rear end, [2] front end, [3] intermediate point
Intermediate point move
command input (ST2)
Front end move command
input (ST1)
Rear end positioning
complete output (PE0)
Intermediate point positioning
complete output (PE2)
Front end positioning
complete output (PE1)
Speed
Rear end
5 mm
Intermediate point
200 mm
Front end
380 mm
Time
Sequence is
performed at
the front end
Sequence is
performed at the
intermediate
point