IAI America PCON-CY User Manual
Page 74
64
5. Operation Using I/O Signals
z Meaning of Positioning Complete Output Signals (PE0, PE1, PE2)
These signals indicate that the target position has been reached. They turn ON when the following conditions are met:
[1] The homing complete output signal (HEND) is ON.
[2] The actuator has entered the positioning band before the target position.
Each signal can be used as trigger signal for peripheral equipment when the target position is reached.
Increasing the positioning band quickens the timing of the next command issued to peripheral equipment, and
consequently the tact time becomes shorter.
(Note) If the servo turns off or an emergency stop is actuated while the actuator is standing still at the target position,
the output will turn OFF. When the servo subsequently turns on, the output will turn ON again if the actuator is
still inside the positioning band.
Caution:
All position detection outputs will turn OFF once a phase A/B open detection alarm generates.
z Notes on Setting the Positioning Band
The positioning band setting defines the range of coordinates at which the positioning complete output signal will turn ON.
Condition for a positioning complete output signal to turn ON = The actuator enters the positioning band before the target
position
With a normal move command, once the positioning complete output signal turns ON, the sequence processing will be
performed and the move command input signal will turn OFF.
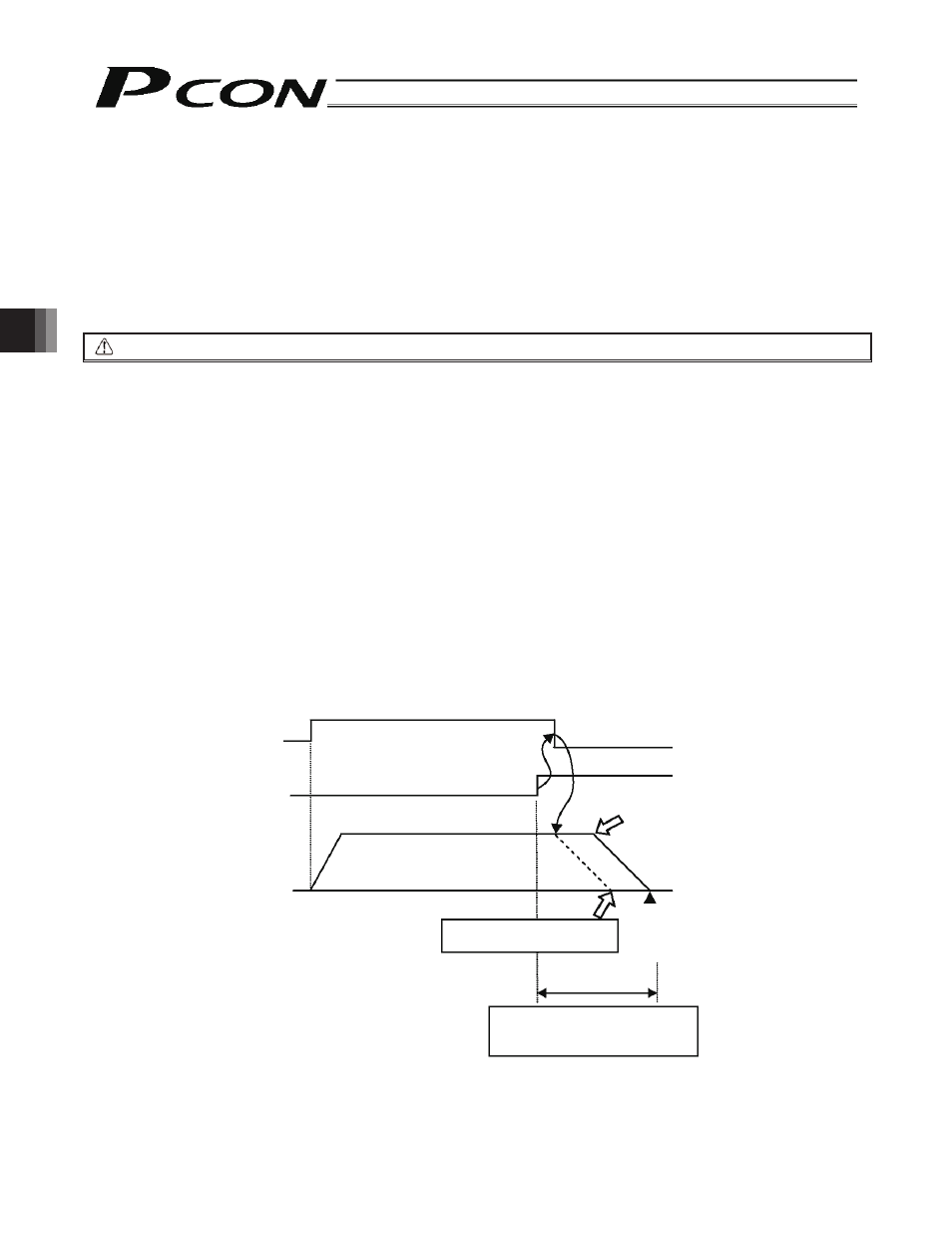
Take note that if the positioning band is wide and the move command input signal turns OFF too quickly, the target position
may not be achieved.
(Example) If the feed speed is 300 mm/s and deceleration is 0.3 G, the deceleration distance is approx. 15 mm. If the
positioning band is set to 30 mm, the positioning complete output signal will turn ON before the actuator starts
decelerating.
If the PLC turns OFF the move command input signal immediately thereafter, the controller will start the
deceleration stop processing.
As a result, the actuator will stop before the target position.
Front end move
command input (ST1)
Front end positioning
complete output (PE1)
Correct starting point
of deceleration
Front end
The actuator stops before
the front end.
Positioning band
The positioning band is greater
than the deceleration distance.