8 easy-tune – Micromod Micro-DCI: 53SL6000 Single Loop Controller User Manual
Page 106
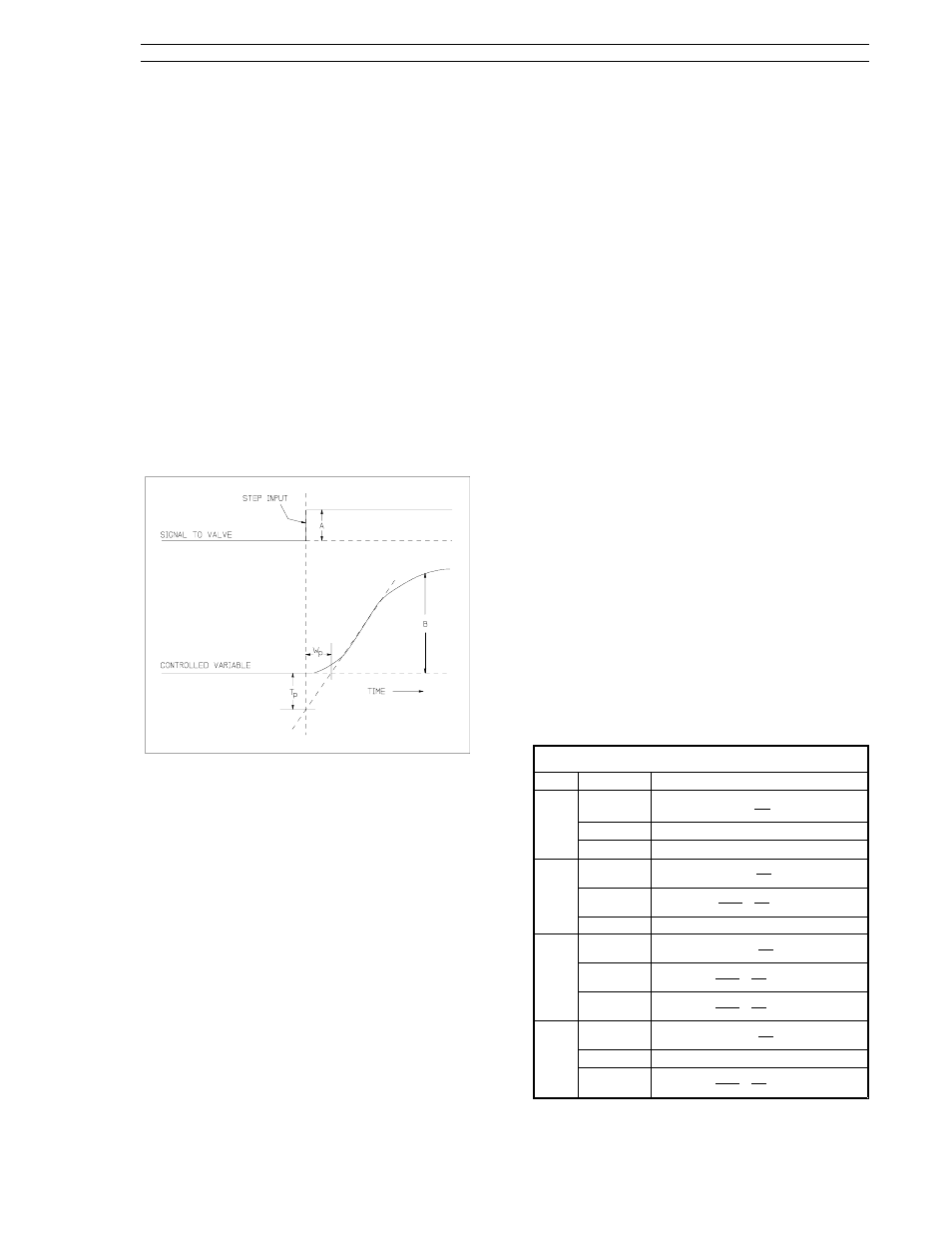
nitude of the step in percent of full signal span
A. Also plot a graph of the resulting transient
curve traced by the controlled variable.
3.
Draw a straight line tangent to a point on the
curve having the greatest slope (most linear).
4.
Measure the apparent dead time Wp in min-
utes as shown in Figure 9-1.
5.
Measure Tp, the product of the slope and dead
time as shown in Figure 9-1. This value should
be expressed in percent of full scale span.
6.
Using the multipliers provided, compute the
best settings as follows:
•
Proportional (P): Pb = (100Tp)/A.
•
Proportional and integral (PI): Pb =
(100Tp)/A; tr = 3Wp.
•
P r o p o r t i o na l, in te gr a l, an d d er i va ti ve
(PID): Pb = (80Tp)/A; tr = 2Wp; td =
0.5Wp.
Figure 9-1. Typical Step Response Record
9.8 Easy-Tune
The Easy-Tune algorithm approximates a first or-
der time lag with gain and dead-time to determine
the optimal PID characteristic constants. The
Easy-Tune sequence is graphically illustrated in
Figure 9-2. In the figure, the first step change is
used to calculate a preliminary estimate of the first
order time lag (Tp) and the dead-time (Wp) by
building an approximated process step response
curve model. Detailed illustrations of this approxi-
mation are shown in Figures 9-3 and 9-4. The
second step change, shown in Figure 9-2, is used
to calculate the process gain (Kp) measured as the
proportionality between the output step change and
process response. Using the same techniques il-
lustrated in Figures 9-3 and 9-4, the final estimates
for the time lag (Tp) and dead-time (Wp) values are
also made as the process step response curve
decays after the second step change is removed.
The values for Tp, Wp, and Kp, are then applied to
the ITAE (Integral Time Absolute Error) equations
given in Table 9-1. The equation results can be
previewed or allowed to be automatically entered
into the tuning constants P, I, D for the selected
loop. Values entered into the tuning constants are
limited to controller specifications as follows:
Proportional (EPb)
1000 - 2
Integral (Etr)
200 - 0.02, 0 (off)
Derivative (Etd)
8 - 0.01, 0 (off)
Before executing Easy-Tune the following must be
considered:
1.
For slow processes, be sure the process vari-
able is steady before executing Easy-Tune.
2.
Disturbance of the process during Easy-Tune
execution may result in a false process charac-
terization.
3.
Feed forward control must be OFF.
4.
If the ratio of process dead-time Wp and the
process time lag Tp is greater than 0.5, it is
recommended that the PID control mode be
used (e.g., cM = PID in Table 9-2).
5.
Processes that act as pure integrators can not
be tuned by Easy-Tune because those proc-
esses have no self regulation, as only one
value of the controller output is able to cause a
steady state process.
6.
In rare cases, a process response may not be
satisfactorily approximated as a first order time
lag with gain and dead-time.
Table 9-1. ITAE Equations
Mode
Action
Equation
P
PB in %
204K
p
(
W
p
T
p
)
1.084
TR (Min)
0
TD (Min)
0
PI
PB in %
116.4
K
p
(
W
p
T
p
)
0.977
TR (Min)
T
p
40.44
(
W
p
T
p
)
0.68
TD (Min)
0
PID
PB in %
73.69
K
p
(
W
p
T
p
)
0.947
TR (Min)
T
p
51.02
(
W
p
T
p
)
0.738
TD (Min)
T
p
157.5
(
W
p
T
p
)
0.995
PD*
PB in %
54.38
K
p
(
W
p
T
p
)
0.947
TR (Min)
0
TD (Min)
T
p
157.5
(
W
p
T
p
)
0.995
*Empirical estimates not based on ITAE method.
Section 9. Commissioning
53SL6000 Instruction Manual
9-3