0 commissioning, 1 overview, 2 proportional action (pb) – Micromod Micro-DCI: 53SL6000 Single Loop Controller User Manual
Page 104: 3 integral action (tr)
9.1 Overview
Commissioning is an iterative process of refining
the proportional band - Pb (Pb.2), integral or reset
time - tr (tr.2), and derivative time - td (td.2) pa-
rameter values for each active control module.
Collectively, these three control action parameters
are called the PID and can be accessed from the
oPEr menu if they are enabled for display with the
conF-OPr-Pid.E parameter or they can be ac-
cessed from the conF-cn.1(cn.2) module. The val-
u e s e n t e r e d f o r t h e se th r ee pa r am et er s ar e
dependent upon the process application and de-
sired controller response to disturbances. It is not
necessary to have all three parameters active for
every process application. If a control strategy is
implemented that uses both control modules (cn.1
and cn.2), then the PID parameters for each control
module may require configuring.
9.2 Proportional Action (Pb)
In proportional action (conF-cn.1[cn.2]-Pb) there is
a comparative relationship between the controller
output signal magnitude and the calculated error,
which is the difference between the measured
process variable feedback and the desired set-
point. The proportional action of the controller is
set as a percentage of the proportional band (%PB)
from 2% to 1000%. If the %PB (Pb) is set at 2%, a
small percent change in error causes full scale out-
put signal magnitude (narrow proportional band).
Conversely, If the %PB (Pb) is set at 1000%, a
large percent change in error causes full scale out-
put signal magnitude (wide proportional band).
Because it is the process itself that provides the
feedback as the process variable, the controller
output must be correctly spanned to the maxi-
mum/minimum swing of the process control ele-
ment, and it is assumed the output signal sent to
the the process control element will positionally
alter it to null the calculated deviation error.
Process dynamics can therefore adversely affect
correct process control element positioning. For
example, two process disturbances that cause the
same calculated deviation error will not necessarily
cause a repositioning of the process control ele-
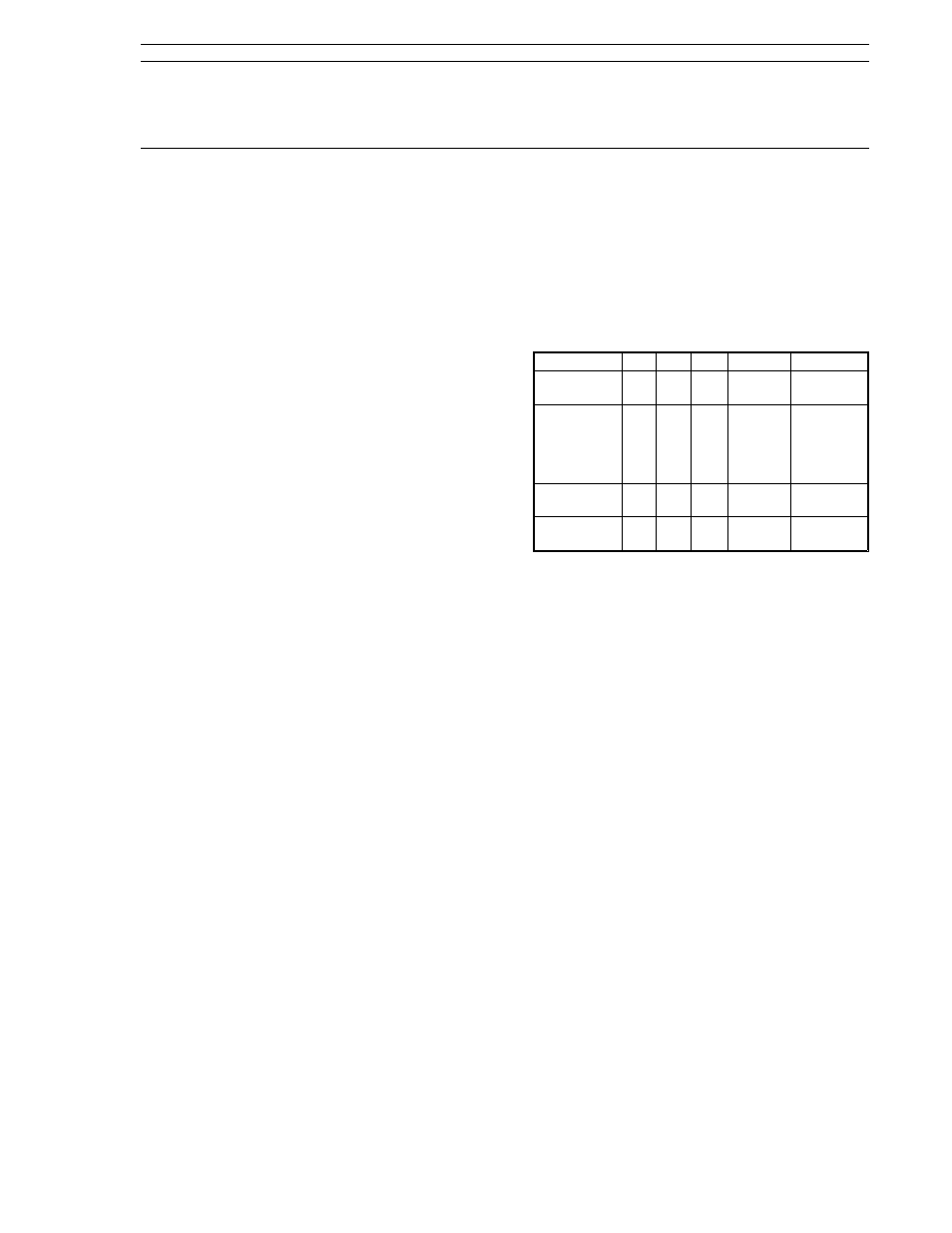
ment. As shown in the table, Disturbance 1 caused
an error of 3. The process control element position
was changed to overcome the error and restore PV
back to setpoint, but the cause of the disturbance
was not removed; therefore, the controller output
must remain at its new position to keep the PV at
10. With disturbance 2, an error of identical magni-
tude (3) is created; the process control element will
not move because it is already resting at its
spanned value for that output signal level
even
though the process has not been restored to the
desired setpoint of 10. The cumulative effect on
process control of this inherent deficiency of pro-
portional action is called offset error (off from set-
point).
Disturbance
SP
PV
Error
Output
Action
quiescent
10
10
0
no
change
none
1
10
7
3
new
value
change
process
control
element
position
quiescent
10
10
0
same as
for 1
none
2
10
7
3
same as
for 1
none
If offset error occurs within a tolerable range, it can
be ignored; if it occurs as an unacceptable value
with
±
tolerable variances, it can be countered with
manual reset (Mr). There is an Mr prompt that that
can be accessed from each control module, cn.1 or
cn.2. Manual reset is entered as a value from 0%
to 100% output to compensate for the deviation
from setpoint that proportional action can not elimi-
nate. Because manual reset is entered as a fixed
value, it is limited with respect to process dynam-
ics. An alternative to manual reset is integral ac-
tion (tr).
9.3 Integral Action (tr)
Integral action (conF-cn.1[cn.2]-tr) augments pro-
portional action to cause the controller to drive the
process control element until the process deviation
is nulled. It is sometimes called reset, which
means return to setpoint. Integral action produces
a signal value that is a function of the deviation
from setpoint and the %PB setting. For example, if
setpoint was at 500
°
F and the controlled process
temperature dropped down to
400°
F, there would
be a 100
°
F deviation. If %PB had been set at 10%,
then the integral action in the first repetition interval
would be 10% x 100
°
or 0.1 x 100
°
= 10
°
. The
process control element would be moved until tem-
perature increased an additional 10
°
from 400
°
to
410
°
. In the second repetition interval, integral ac-
tion would be 10% x 90
°
or 0.1 x 90
°
= 9
°
. The
9.0 Commissioning
Section 9. Commissioning
53SL6000 Instruction Manual
9-1