Rockwell Automation 1336F PLUS II User Manual - Firmware 1.xxx-6.xxx User Manual
Page 78
5–10
Start-Up
Apply Power to Drive
Verify Frequency
Command = 0
Verify Forward
Rotation
Slowly Increase Speed
Verify Direction of
Rotation
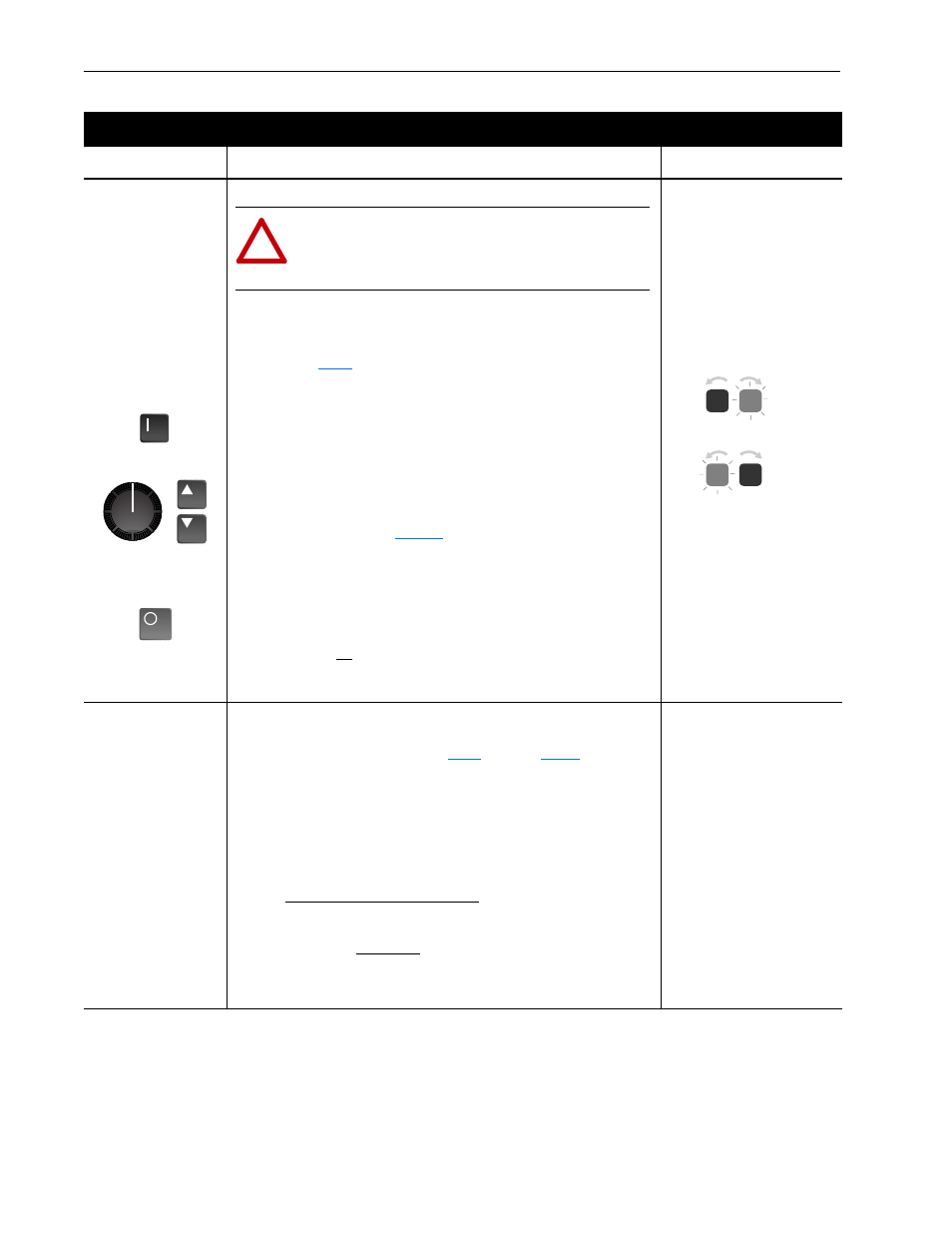
14. Check for Correct Motor Rotation.
A. Reapply power to the drive.
B. Verify that the frequency command is at zero Hz. For further information,
refer to
.
C. Using the Direction LEDs, verify that forward direction is selected.
D. Start the drive and slowly increase the speed until the motor begins to turn.
Note the direction of motor rotation. If the direction of rotation is as desired,
proceed to Step E.
If the direction of motor rotation is incorrect, stop the drive and remove all
power. When the HIM Display is no longer illuminated, remove the drive
cover. Verify that the bus voltage measured at “DC +” & “DC –” of TB1 is
zero (see Attention on
). Interchange any two of the three motor
leads at TB1 - U, V or W. Repeat Steps A through D.
E. If encoder feedback is being used, verify that the polarity (“+” or “–”) of
[Encoder Freq] equals the polarity of the actual drive output as shown on
the Status Display. If the polarities are the same, go to step F.
If polarities are different, stop the drive, remove all power. Reverse the “A”
& “A NOT” OR “B” & “B NOT” wiring. Repeat Steps A through D.
F.
Stop the drive and replace drive cover.
At Speed
+
5.00 Hz
15. Low Speed Operation.
(Speed range greater than 20:1)
If Volts/Hertz operation was selected in
.
Slip @ F.L.A. Adjustment.
To increase the steady state torque performance of the motor at low speeds,
the default Speed Control method is Slip Compensation. The factory default
value for [Slip @ F.L.A.] is “1.0 Hz.” Optimum motor performance depends on
accurate setting of [Slip @ F.L.A.].
Estimate your motor slip value using the following:
Continued on next page
Advanced Start-Up Procedure
Press these keys . . .
while following these steps . . .
The HIM Display will show . . .
or
ATTENTION: In the following steps, rotation of the motor in an
undesired direction can occur. To guard against possible injury and/
or equipment damage, it is recommended that the motor be discon-
nected from the load before proceeding.
!
Motor Sync. RPM - Motor Rated RPM
Motor Sync. RPM
Example:
x Motor Rated Freq. (Hz)
1800 – 1778
1800
x 60 = 0.7 Hz Slip @ F.L.A.