Drive 0 - drive 4 control subroutines – Rockwell Automation 22-COMM-C ControlNet Adapter User Manual
Page 79
Using Multi-Drive Mode
7-11
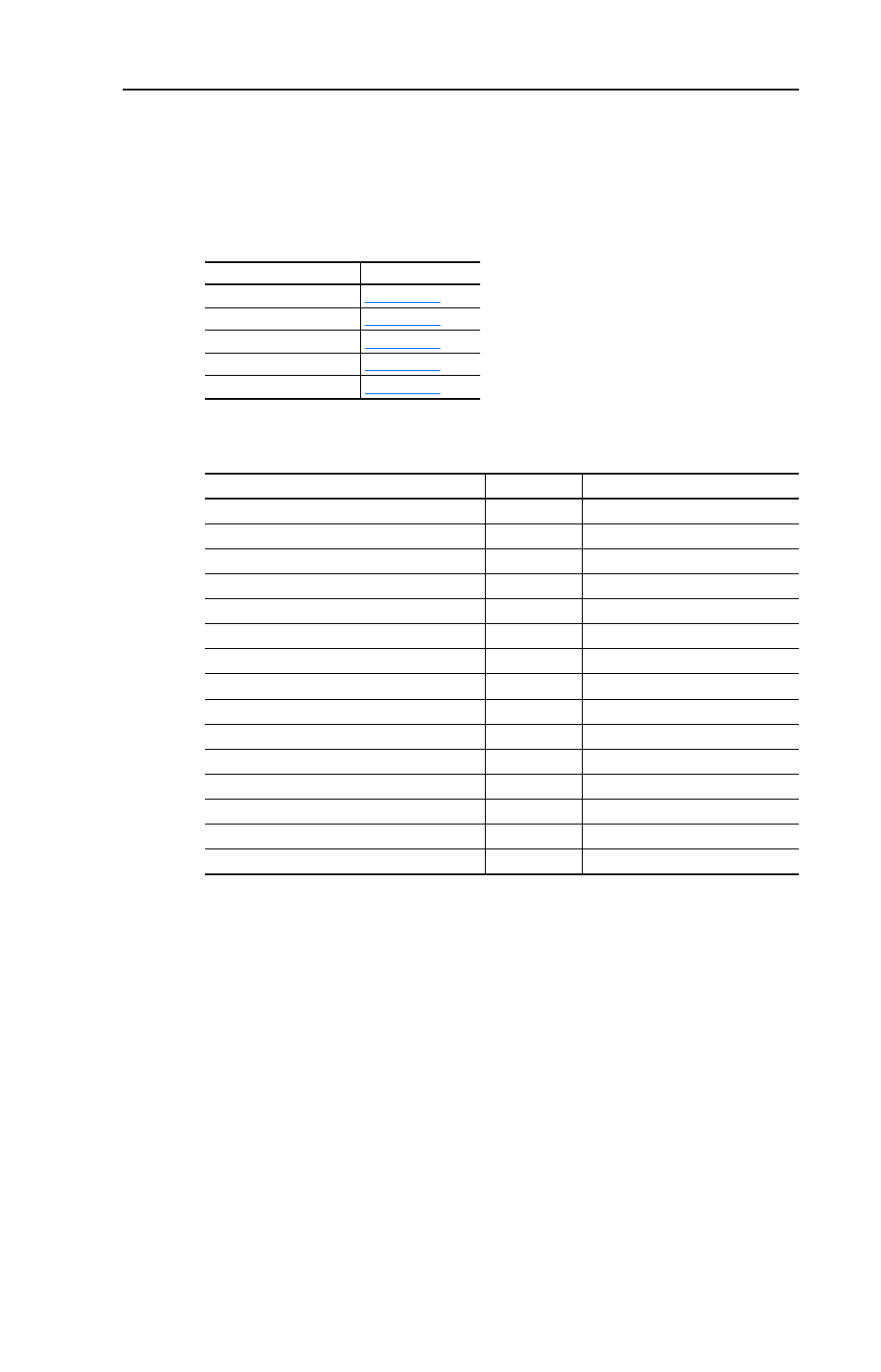
Drive 0 - Drive 4 Control Subroutines
The following Drive Control subroutines provide status information
(Logic Status and Feedback), control (Logic Command and Reference),
and parameter read/write for each of the respective drives:
The following program tags are used for the Drive 0 Control Subroutine:
Drive 1 through Drive 4 program tags are identical except for the naming
convention. For example, “Drive_0_Status_Ready” for Drive 0 would be
“Drive_1_Status_Ready” for Drive 1.
Control Subroutine
Refer to…
Drive 0
Drive 1
Drive 2
Drive 3
Drive 4
Tag Name
Type
Description
Drive_0_Status_Ready
BOOL
Drive 0 ready bit
Drive_0_Status_Active
BOOL
Drive 0 active bit
Drive_0_Status_Forward
BOOL
Drive 0 forward bit
Drive_0_Status_Reverse
BOOL
Drive 0 reverse bit
Drive_0_Status_Faulted
BOOL
Drive 0 faulted bit
Drive_0_Status_At_Speed
BOOL
Drive 0 at speed bit
Drive_0_Speed_Feedback
INT
Drive 0 speed feedback word
Drive_0_Command_Stop
BOOL
Drive 0 stop bit
Drive_0_Command_Start
BOOL
Drive 0 start bit
Drive_0_Command_Jog
BOOL
Drive 0 jog bit
Drive_0_Command_Clear_Faults
BOOL
Drive 0 clear faults bit
Drive_0_Command_Forward_Reverse
BOOL
Drive 0 forward/reverse bit
Drive_0_Speed_Reference
INT
Drive 0 speed reference word
Drive_0_Parameter_Read_Message
MESSAGE
Get_Attribute_Single (Read)
Drive_0_Parameter_Write_Message
MESSAGE
Set_Atrribute_Single (Write)