4 [settings] [position set, Settings] [position set – Festo Контроллеры двигателя SFC-LAC User Manual
Page 79
4. The control panel (only type SFC−LACI−...−H2)
4−15
Festo GDCP−SFC−LACI−IO−EN en 0812NH
4.5.4
[Settings] [Position set]
Parametrising the position set table
·
Observe the instructions in section 5.2.7.
·
Select first the number of the desired positioning record.
The following settings refer to the currently selected posiĆ
tioning record.
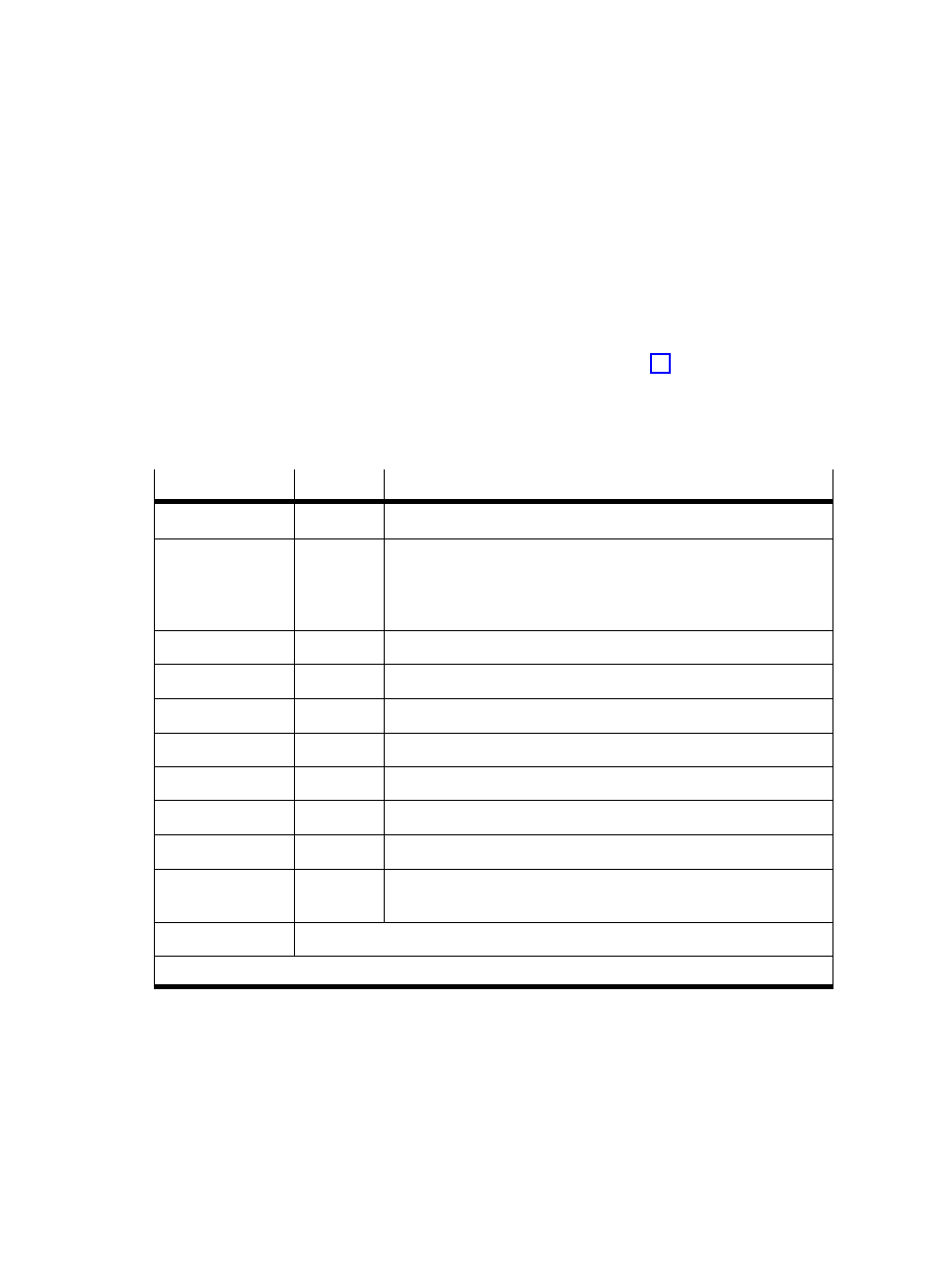
[Position set]
Param.
Description
[Position nr]
No.
Number of the positioning record [1...31]
[Pos set mode]
[absolute/
relative]
Positioning mode
absolute = Position specification refers to the project zero point
relative = Position specification refers to the current position
e = energy−optimized path generator
[Position]
*)
xt
Target position in [mm]
[Velocity]
vel
Positioning speed in [mm/s]
[Acceleration]
a
Acceleration in [mm/s
2
]
[Deceleration]
d
Deceleration in [mm/s
2
]
[Jerk Acc]
Yes
Acceleration jerk in [m/s
3
]
[Jerk Dec]
jd
Deceleration jerk in [m/s
3
]
[Work load]
m
Applied load (= workpiece mass) in [g]
Time MC
t_MC
Damping time (time between reaching the target window and
setting Motion Complete")
[SAVE...]
Saves parameters to the EEPROM
*)
Teaching is only possible after a successful homing run.