IAI America PCON-CFA User Manual
Page 256
4. SCON-CA
250
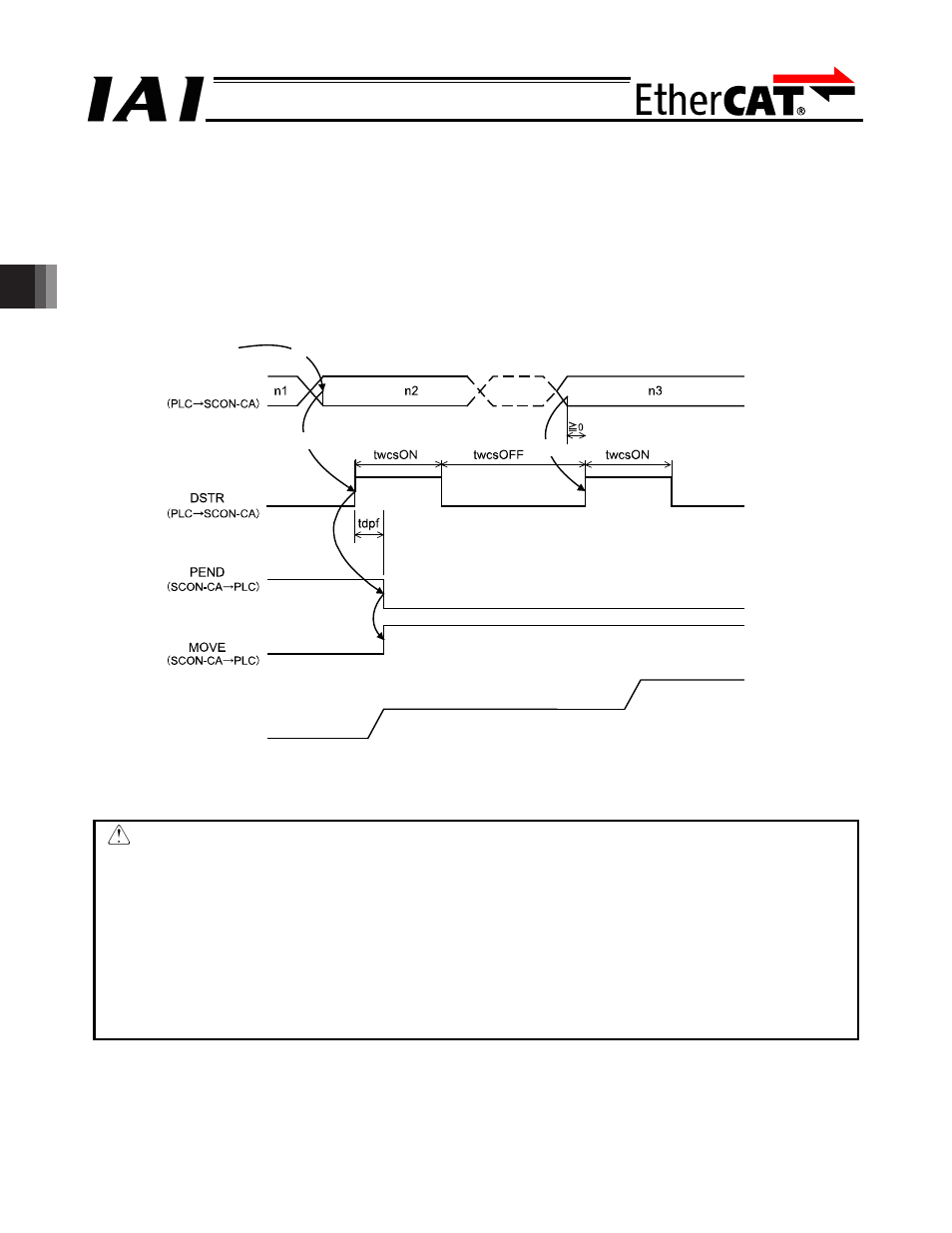
(4) Data change during movement
In the half direct mode or full direct mode 1 to 3, the value currently set to a given resister among the
resisters for target position data, acceleration/deceleration data, speed data, positioning band and
push-motion current-limiting value, can be changed while the actuator is moving.
After changing the data, turn “ON” the positioning command (DSTR) for more than tdpf.
Also, after turning “OFF” the DSTR, set aside some time for “twcsON + twcsOFF” or more, until the next
DSTR is turned “ON”.
The example is shows as follows, where the speed and acceleration/deceleration data items have been
changed.
twcsON Yt
xt3 (msec)
twcsOFF Yt
xt3 (msec)
*Yt
xt tpdf Ytxt3 (msec)
Caution
1. When the speed has not been set or it is set to “0”, the actuator is not moved, but an alarm is not
issued.
2. When the speed setting is changed to “0” during the movement, the actuator is decelerated and
stopped, but an alarm is not issued.
3. Even when the acceleration/deceleration data only is changed during the movement, the setting of
the target position data is required.
4. Even when the target position data only is changed during the movement, the setting of the
acceleration/deceleration data is required.
Set value of speed or
acceleration/deceleration
[1]
[2]
[3]
Actuator speed
Speed n2
Speed n3