IAI America PCON-CFA User Manual
Page 162
4. SCON-CA
156
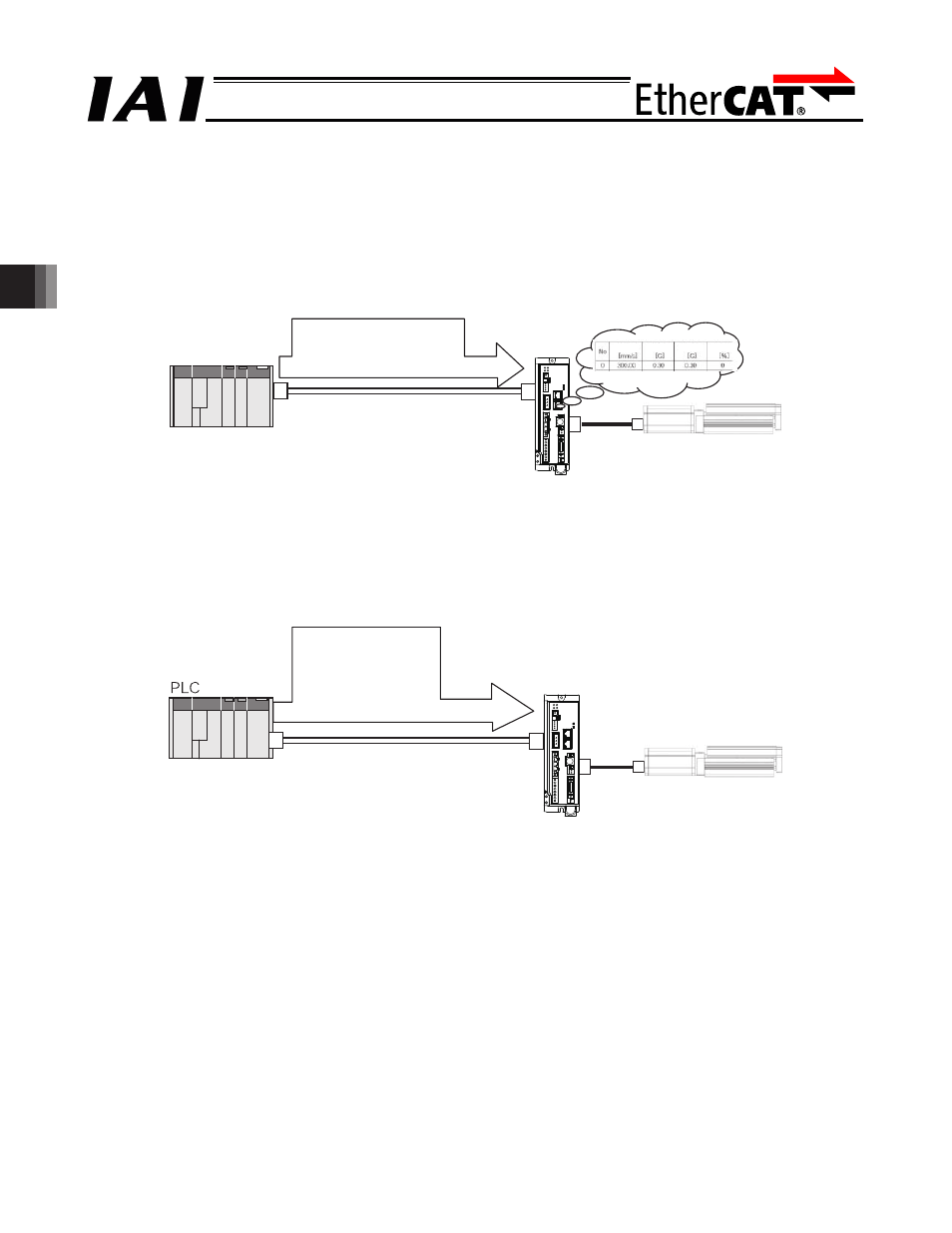
[2] Position/simple direct mode: In this mode, the actuator is operated by specifying position numbers.
You can select whether to specify the target position directly as a value, or
use a value registered in the position data table, by switching a control
signal.
For the speed, acceleration/deceleration, positioning band, etc., values
preregistered in the position data table are used. Up to 768 position data
points can be set.
Number of occupied bytes: 8 bytes
,5 <;77;:99
;77;:';
+('=<<;7:5
"6 ,*
2=;
+< 3
! 2 8 7;:
=6
22 8 7;:
[3] Half direct mode: In this mode, the actuator is operated by specifying the speed,
acceleration/deceleration and push current, in addition to the target position, directly
as values.
Number of occupied bytes: 16 bytes
+('=<<;7:5
"6 ,*
2=;
,5 <;77;:99
;77;:7:51:399
+< 3< 274727;:
99 2
22 8 7;:3 2 8 7;:
$
=62= :