IAI America RCS-E User Manual
Page 80
64
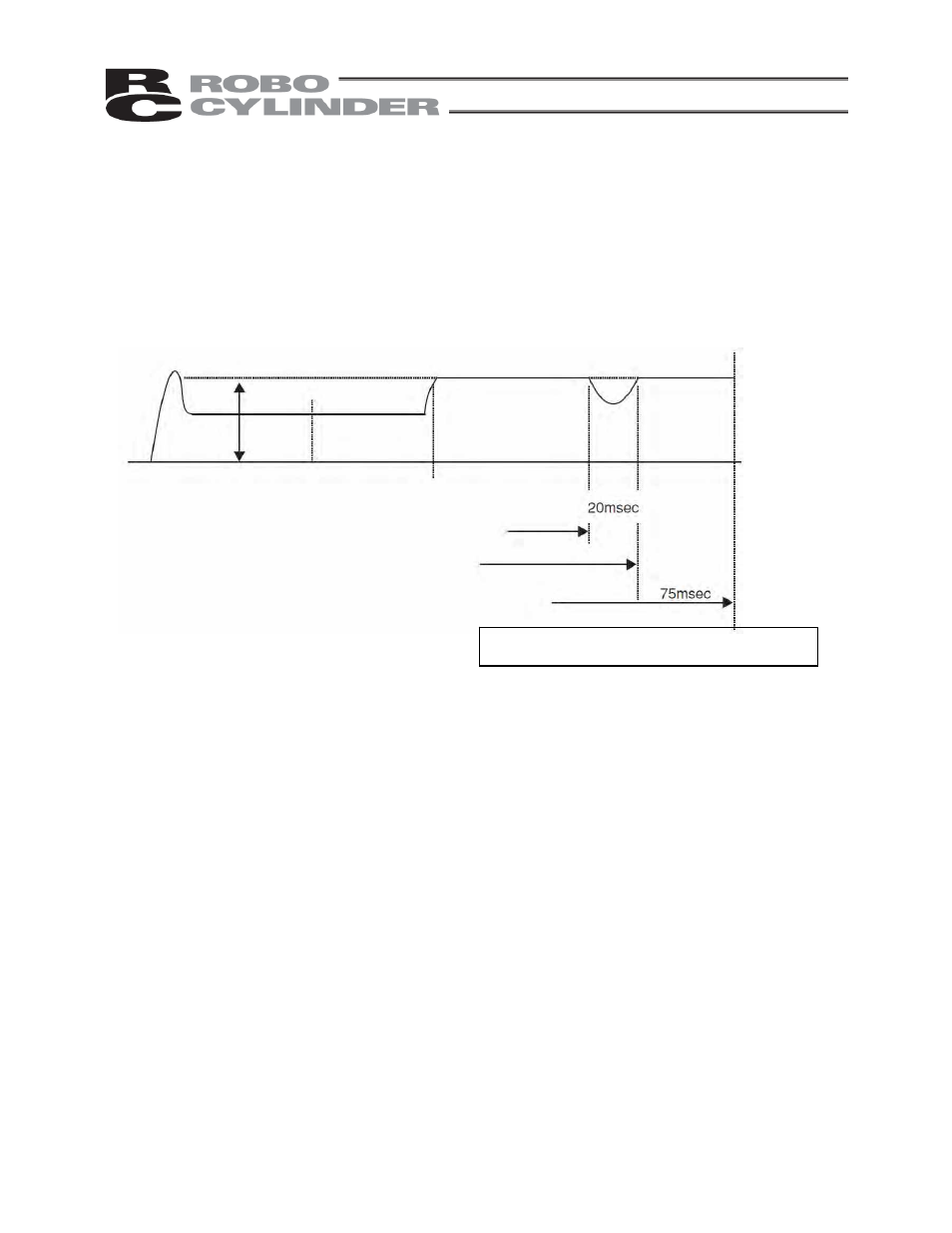
Push current
Start position
Target position
Counting starts
Count to 200
Decrement to 180
Count to 255
Completion of push-mode operation is recognized.
Push & hold recognition time
This parameter is used as a condition for determining if the actuator has contacted the work part and completed
its push-mode operation.
Specifically, push-mode operation is deemed complete if the current limit value set in the position table has been
maintained for the time set in parameter No. 6.
Set this parameter to an optimal value in accordance with the current limit value, by considering the shape and
strength of the work part, etc.
The minimum setting unit is 1 msec, and the maximum value is 255 msec. This parameter has been set to “255”
msec at the factory.
(Note) If the work part has shifted and current has changed during the push & hold recognition time, the
judgment will be made as follows. In this example, the push & hold recognition time is set to 255 msec.
If the push current is maintained for 200 msec and then drops for 20 msec thereafter, the counter is decremented
by 20. Upon recovery of the push current, counting resumes from 180. If the push current is maintained for 75
msec, the counter will have counted up to 255 and thus the controller will recognize completion of push-mode
operation.
In this case, the judgment requires a total of 295 msec.
Current limit value during positioning stop
At the factory, this parameter has been set to a current value corresponding to the standard specification of the
actuator.
Increasing this value will increase the holding torque while the actuator is stopped.
This parameter need not be changed in normal conditions of use. However, hunting will occur if excessive
external force applies to the actuator while the actuator is stopped. In this case, the value set in parameter No. 12
must be increased.
If you need to change this parameter, please contact IAI first.
Current limit value during homing
At the factory, this parameter has been set to a current value corresponding to the standard specification of the
actuator.
Increasing this value will increase the torque during homing.
This parameter need not be changed in normal conditions of use. However, the value set in parameter No. 13
must be increased if the slide resistance has increased in a vertical application due to the affixing method, load
condition, etc., and homing completes before the correct position.
If you wish to change this parameter, please contact IAI first.