IAI America RCS-E User Manual
Page 40
24
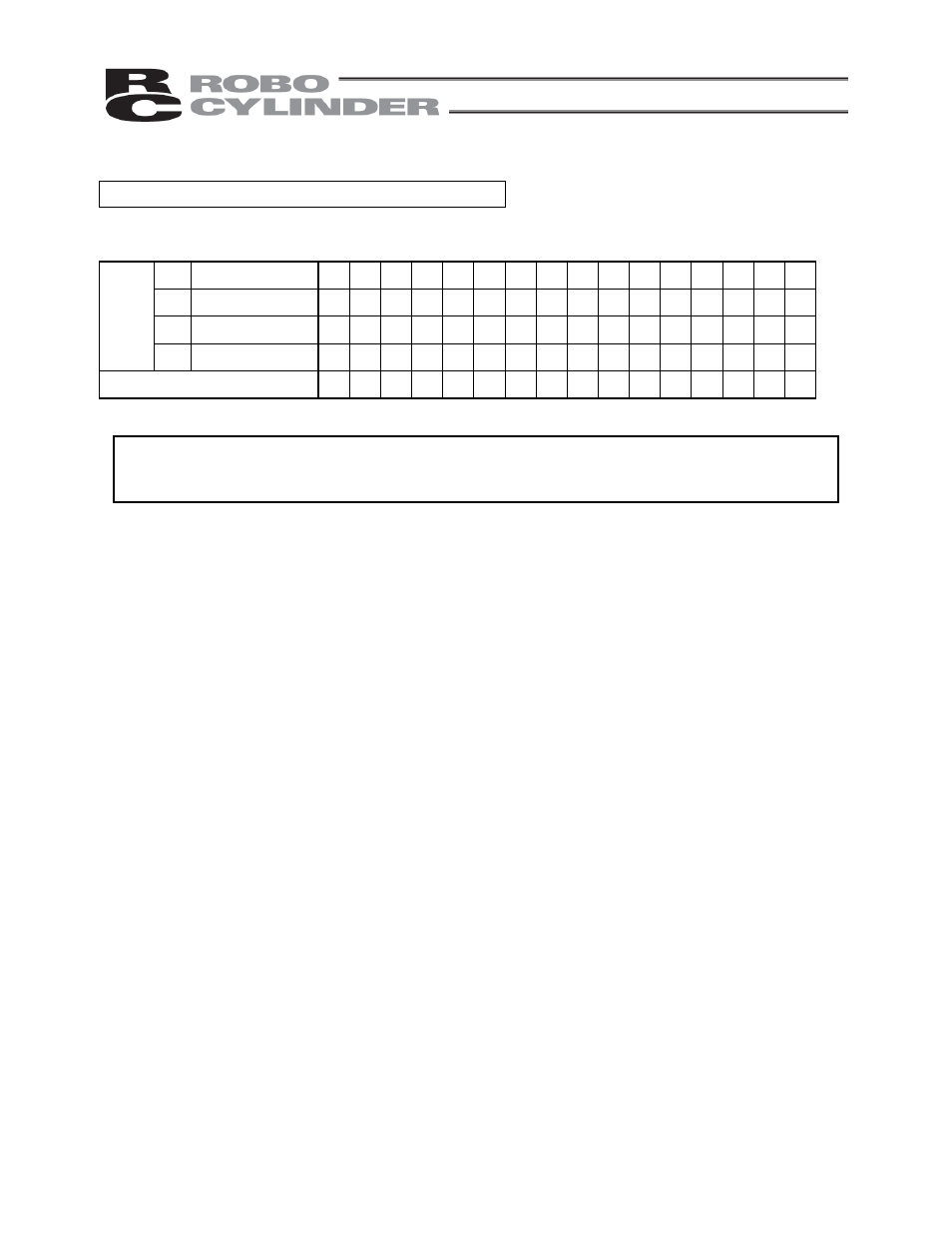
[1] Command
position
Relationship of input pin numbers and selected position numbers (4-bit binary)
One of 16 positions from 0 to 15 can be input/selected.
1: ON
0: OFF
4
Command position 1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
5
Command position 2
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
6
Command position 4
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
Pin No.
7
Command position 8
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
Selected position No.
0
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15
Note: The actuator will not operate if the start input is turned ON after selecting a position number for
which no position data is entered. (A bank 31 error (alarm code: 0B1) will occur.)
[2] Pause
This is a contact-b input. Keep the signal ON while the actuator is moving, and cause it to turn OFF when the
movement pauses.
[3] Reset
An alarm will be reset once a rise of this signal is detected. If the cause of the alarm is not yet removed, the
alarm will come back after the reset action. (Only the overcurrent alarm
When this signal is input while the actuator is in pause, the remaining travel will be cancelled.
[4] Servo
ON
The servo is ON while this signal is ON.
[5] Completed
position
All completed position signals will turn OFF the moment the position complete signal turns OFF.
All completed position signals remain OFF while an emergency stop is actuated or during the direct teaching
mode.
When the controller returns to the ready mode thereafter, the completed position signal corresponding to the
current actuator position will be output if the current actuator position is within the positioning band from the
last position complete position. If the current actuator position is outside the positioning band, all completed
position signals will remain OFF.
In the push & hold mode, all completed position signals will remain OFF when the controller returns to the
ready mode from an emergency-stop status or the direct teaching mode, regardless of the current actuator
position.
When an alarm occurs, a corresponding alarm code (short form) is output by the four bits of completed
positions 1, 2, 4 and 8. The meanings of these signals vary in a normal state and when an alarm is present,
so exercise caution when writing a sequence program. (Refer to 6.3, “PIO Alarm Outputs.”)
[6] Position
complete
This signal will turn ON when the controller becomes ready following a power connection. It will turn OFF
when a start signal is input, and turn ON when a movement is completed