6 speed change during movement, Speed change during movement, P l c – IAI America RCS-E User Manual
Page 63
47
4.6 Speed
Change
during Movement
Example of use in operation)
The actuator speed is reduced at a certain point during movement.
The position 150 mm from the home is set as position 1, and the position 200 mm from
the home is set as position 2. The actuator is initially located between the home and
position 1. The actuator is moved to position 2 being the target position, at a travel
speed of 200 mm/sec to position 1 and that of 100 mm/sec from position 1 to position 2.
Method)
In this example, the actuator is caused to move to position 1 and to position 2
successively. Before the actuator is stopped at position 1, command position 2 must be
selected/entered and the start signal must be input. To do this, set a wide positioning
band at position 1 and cause the start signal for movement to position 2 to be input
immediately after the completion signal for movement to position 1 is output. (Command
position 2 should be entered while the actuator is moving to position 1.)
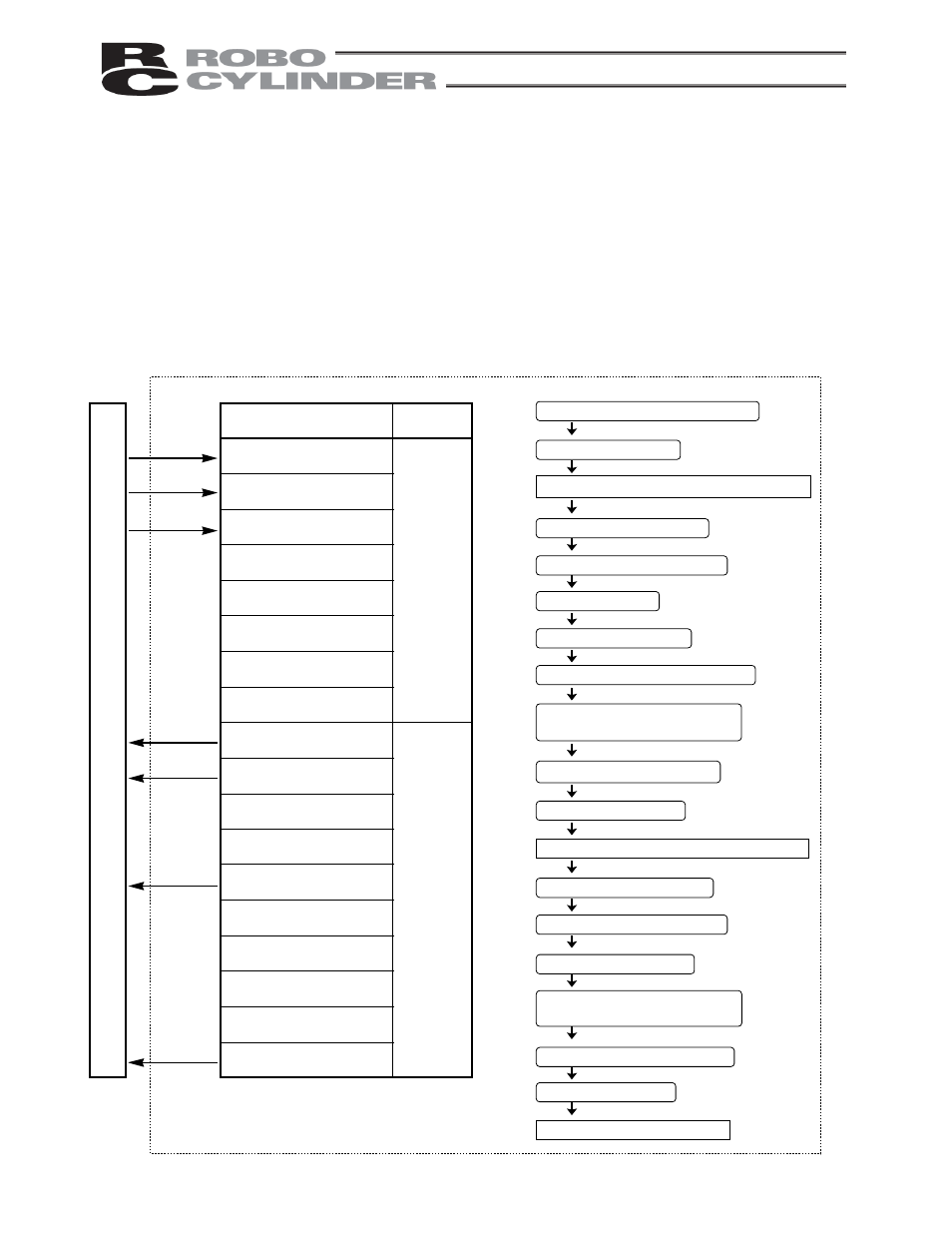
RCS controller
P
L
C
[11] [9] [5] [2]
[1]
[6]
[8]
[13]
[12] [10] [7] [3]
[14] [4]
PIO
Signal name
Start
Command position 1
Command position 2
Command position 4
Command position 8
Pause
Reset
Servo ON
Completed position 1
Completed position 2
Completed position 4
Completed position 8
Position complete
Home return completion
Zone
Alarm
Emergency stop
Moving
Category
Input
Output
Reference flow
Select/enter command position 1.
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
Start input ON
Movement to position 1 starts at 200 mm/sec.
Completed position OFF
Position complete output OFF
Moving output ON
Start input OFF
Select/enter command position 2.
Start input ON
Completed position OFF
Position complete output OFF
Start input OFF
Completed position 1 is output.
Moving output OFF
Movement to position 2 completes.
Position complete output turns ON 1
mm before position 1.
Movement to position 2 starts at 100 mm/sec.
Position complete output turns ON
0.1 mm before position 2.
Completed position 2 is output.
*