Yaskawa VS-626 MC5 User Manual
Page 83
Setting User Constants
4.2.5 Initialize Mode
- 20
J
Setting the Control Method: A1-02
D
Use constant A1-02 to select one of the four control methods.
D
This user constant is not returned to the factory setting when constants are initialized. It must be manu-
ally reset to the factory setting.
D
When using winding change function, the setting of constants A1-02 and E3-01 (motor 2 control selec-
tion) should be the same.
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
during
Opera-
tion
Setting
Range
Unit
Factory
Setting
Open Loop
Vector
Flux Vector
A1-02
Control method selec-
tion
2 3
--
2
(Open Loop
Vector)
Q
Q
Control Method Settings
Setting
Function
2
Open-loop vector control
(Vector control using the Inverter internal speed information).
3
Flux vector control
(Vector control using a PG Speed Control Card).
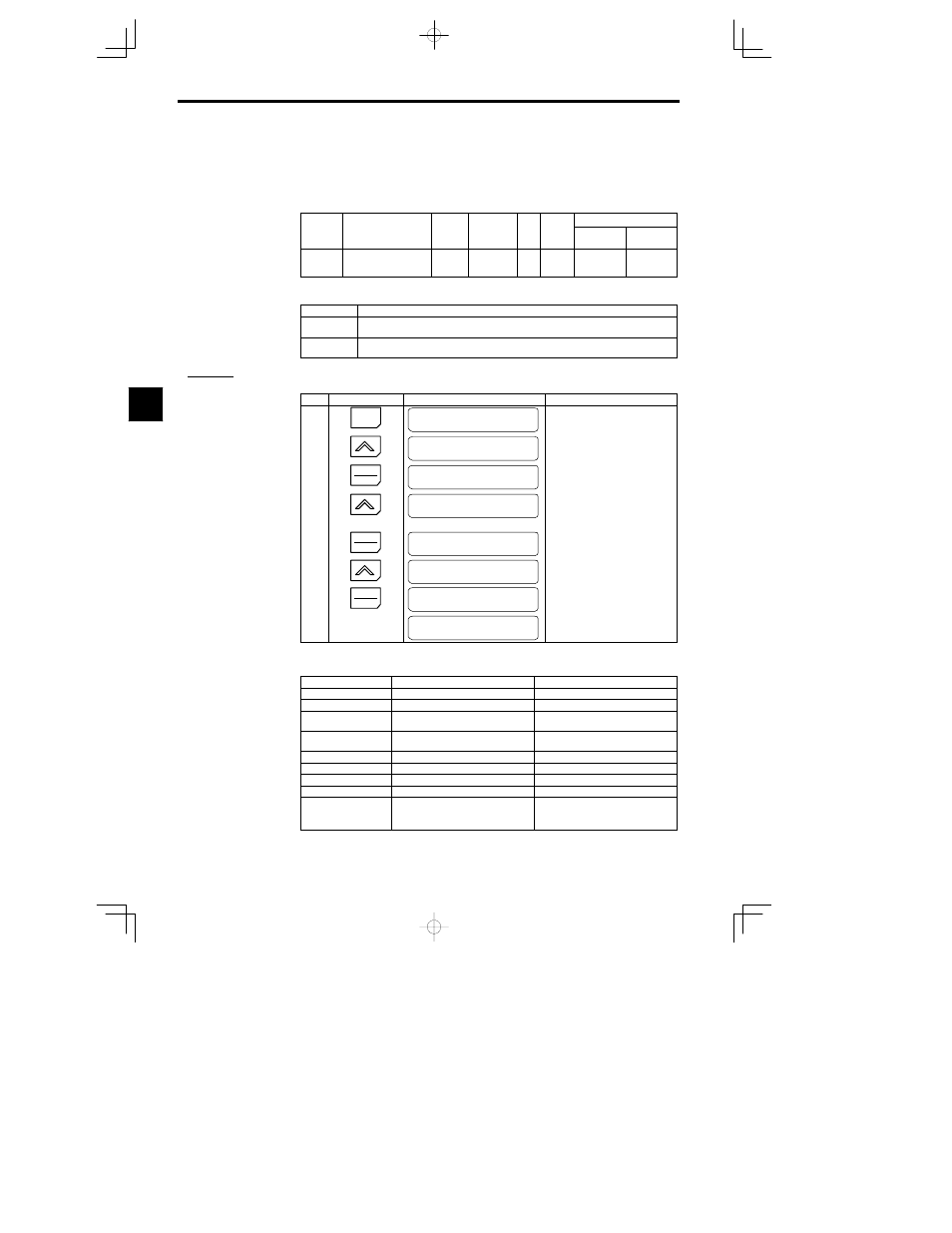
Changing the Control Method to Flux Vector
Use the following procedure to change the control method to select flux vector.
Step
Key Sequence
Digital Operator Display
Remarks
1
MENU
MC5
Main Menu
Operation
2
MC5
Main Menu
Initialize
3
DATA
ENTER
Select language
English
4
Press twice.
Control Method
Open Loop
5
DATA
ENTER
A1--02 = 2
Open Loop
Changed to constant setting level.
6
A1--02 = 3
Flux Vector
7
DATA
ENTER
Entry Accepted
Writes-in the new setting.
Control Method
Flux Vector
After a few seconds, the Operator dis-
play is as shown on the left.
The control method has been changed to flux vector.
Table
4.4
Control Method Characteristics
Characteristic
Open Loop Vector Control
Flux Vector Control
Basic Control Method
Current vector control without PG
Current vector control with PG
Speed Detector
Not required
Required (pulse generator)
Optional Speed
Detectors
Not required
PG-B2 or PG-X2
Speed Control
Accuracy
1:100
1:1000
Starting Torque
150%/1 Hz
150 %/0 r/min
Speed Control Range
0.2%
0.02%
Torque Limit
Possible
Possible
Torque Control
Not possible
Possible
Example Applications
S Variable speed drive applications.
S Simple servo drives.
S Precision speed control.
S Torque control.
4
A
EXAMPLE
"