Yaskawa MotionWorks IEC Hardware User Manual
Page 155
MotionWorks IEC Hardware Configuration – 2013-03-26
152
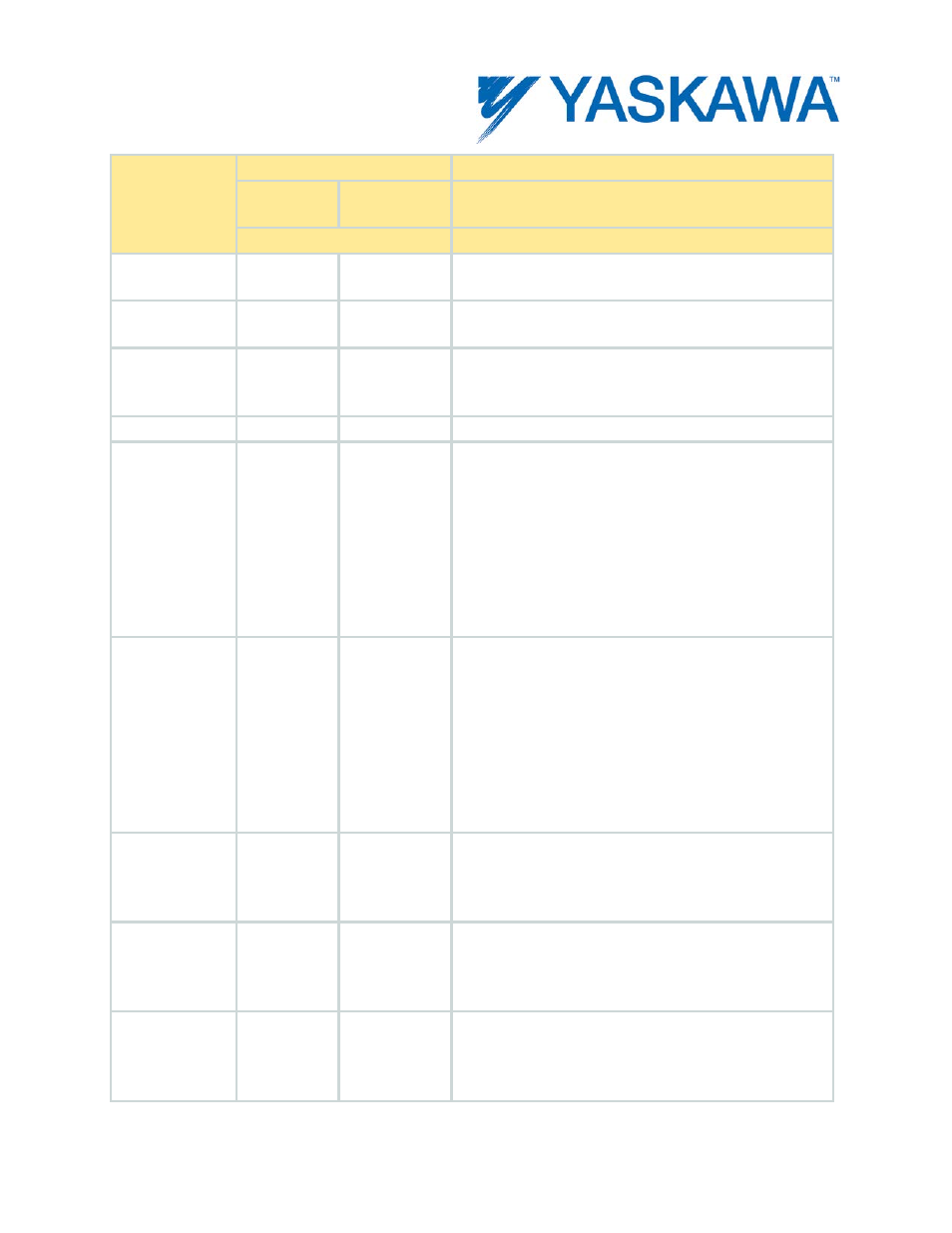
Hex Code
Description
ErrorClass
AxisErrorID
ErrorClass+AxisErrorID output from
MC_ReadAxisError
AlarmID
AlarmID output from Y_ReadAlarm
firmware version. If you would like to use this function
block, then the controller must be updated.
app
340C
F110
All error codes for kernel errors range from 0xF111 to
0xF11f.
app
340C
F111
An internal assertion in the motion kernel failed
indicating the controller is not in a stable state. This
error should be reported to Yaskawa Electric America.
user
3501
0000
A user script task posted an alarm directly.
motionKernel
4202
0001
The command position will soon reach the allowable
range for the axis in the positive direction (positive
overtravel). The axis may not be moved again until the
alarm condition is cleared. After the alarm is cleared, it
is permissible to execute a move which brings the axis
back toward the allowed region, even though the axis
is probably still outside the allowed region. Any move
which pulls the axis further away from the allowed
region will re-trigger the alarm.
motionKernel
4202
0002
The command position will soon reach the allowable
range for the axis in the negative direction (negative
overtravel). The axis may not be moved again until the
alarm condition is cleared. After the alarm is cleared, it
is permissible to execute a move which brings the axis
back toward the allowed region, even though the axis
is probably still outside the allowed region. Any move
which pulls the axis further away from the allowed
region will re-trigger the alarm.
motionKernel
4202
0003
The command speed will soon reach the allowable
range for the axis in the positive direction (overspeed).
The axis may not be moved again until the alarm
condition is cleared.
motionKernel
4202
0004
The command speed will soon reach the allowable
range for the axis in the negative direction
(overspeed). The axis may not be moved again until
the alarm condition is cleared.
motionKernel
4202
0005
The command acceleration will soon reach the
allowable range for the axis in the positive direction.
The axis may not be moved again until the alarm
condition is cleared.