Rockwell Automation Liqui-Flo V2.0 AC Drive User Manual
Page 211
Rockwell Automation Publication D2-3518-3 - May 2013
211
Chapter 10
IXo Voltage-
Range
87
4 Ixo voltage calculated from motor nameplate data is too high. 1. If Ixo calculation is not needed, disable it by clearing bit 2 of
Compensation (inverter parameter 56), then clear fault.
2. If Ixo calculation is needed, re-enter motor nameplate data, and, if
necessary, repeat Autotune (inverter 61).
Line Freq Lost
228
4 Line frequency not in the range of 47...63 Hz.
1. Verify proper input voltage and frequency.
2. Verify connections to I/O board.
3. If fault persists, replace I/O board.
Low DC Bus
223
4 The DC bus voltage is too low.
Verify proper input voltage.
Motor I Imbalance
37
4 The motor current imbalance displayed in inverter Imbalance
Count (221) has exceeded inverter Imbalance Limit (49) for
time configured in inverter Imbalance Time (50).
Clear fault.
Motor Overload
7
1
3
Internal electronic overload trip.
Enable/disable with inverter Fault Config 1 (238).
An excessive motor load exists. Reduce load so drive output current does not
exceed the current set by Motor OL Amps (48).
Not at Voltage
237
4 The rectifier did not regulate to the desired voltage within the
defined time.
1. Verify that rectifier is currently synchronized to the AC line.
2. Check all fuses and cabinet wiring.
3. Replace I/O board.
4. Replace control board and/or power board.
NTC Demux Fail
30
4 Control board cannot read temperature information from
inverter half of power board.
1. Clear faults.
2. If fault persists, verify connections to power board.
3. If fault still persists, replace power board.
OverSpeed Limit
25
1 Functions such as slip compensation or bus regulation have
attempted to add an output frequency adjustment greater
than that programmed in inverter Overspeed Limit (83).
Remove excessive load or overhauling conditions or increase inverter
Overspeed Limit (83).
OverVoltage
5
1 DC bus voltage exceeded maximum value.
Monitor the AC line for high line voltage or transient conditions. Bus
overvoltage can also be caused by motor regeneration. Extend the decel
time.
Parameter Chksum
100
2 The calculated checksum does not match the stored checksum
for inverter parameter values read from the non-volatile
memory on the control board.
This fault can be cleared by writing a nonzero value to inverter
Reset To Defaults parameter (197).
1. Restore inverter defaults using inverter Reset To Defaults parameter
(197).
2. Reload user set if used, or reprogram inverter parameters.
3. If fault recurs, replace control board.
Params Defaulted
48
4 The drive was commanded to write default values to all
inverter parameters.
1. Clear the fault or cycle power to the drive.
2. Program the inverter parameters as needed.
Phase U to Grnd
38
4 A phase-to-ground fault has been detected between the drive
and motor in this phase.
1. Check the wiring between the drive and motor.
2. Check motor for grounded phase.
Phase V to Grnd
39
4
Phase W to Grnd
40
4
Phase UV Short
41
4 Excessive current has been detected between these two output
terminals.
1. Check the motor and drive output terminal wiring for a shorted condition.
Phase VW Short
42
4
Phase UW Short
43
4
Port 1...6 Adapter
71
72
73
74
75
76
4 The network card connected to DPI port stopped
communicating on its external network.
The fault code indicates the offending port number
(71 = port 1, etc.)
1. Check communication board for proper connection to external network.
2. Check external wiring to module on port.
3. Verify external network fault.
Port 1...6 DPI Loss
81
82
83
84
85
86
4 DPI port stopped communicating via DPI, or an attached
peripheral with control capabilities was removed. Fault 82
indicates specifically that the rectifier stopped communicating
with the inverter.
1. If DPI device was not intentionally disconnected, check wiring to the port.
Replace wiring, port expander, peripherals, control board as required.
2. If fault 82 occurs, disconnect all external peripherals and cycle power to
drive. If fault 82 recurs, replace control board.
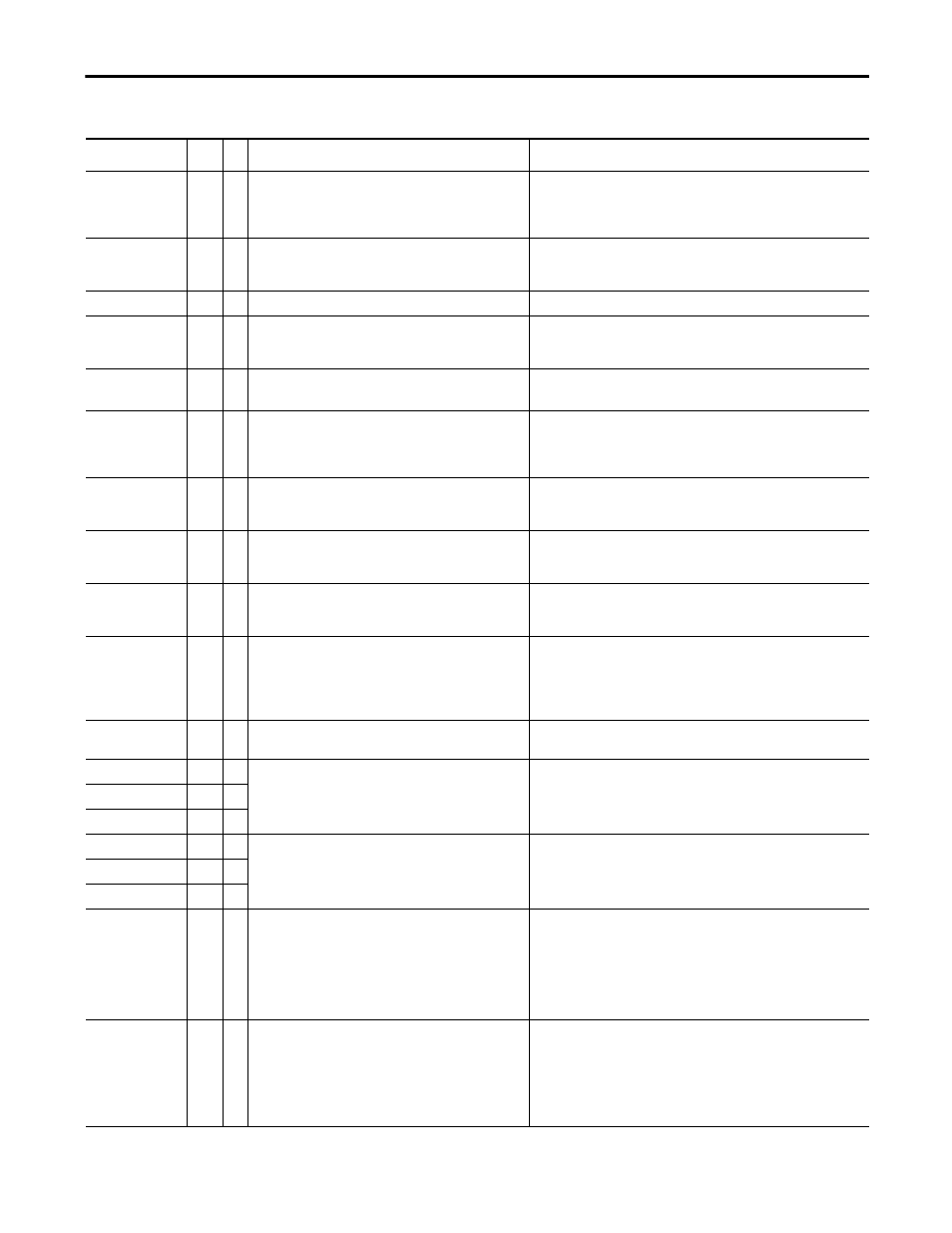
Table 22 - Fault Descriptions and Corrective Actions (Frame 4) (Continued)
Fault
No
.
Ty
pe
Description
Action