Pid reference and feedback, Pid deadband – Rockwell Automation 284G ArmorStart - User Manual User Manual
Page 311
PID Setup
H-3
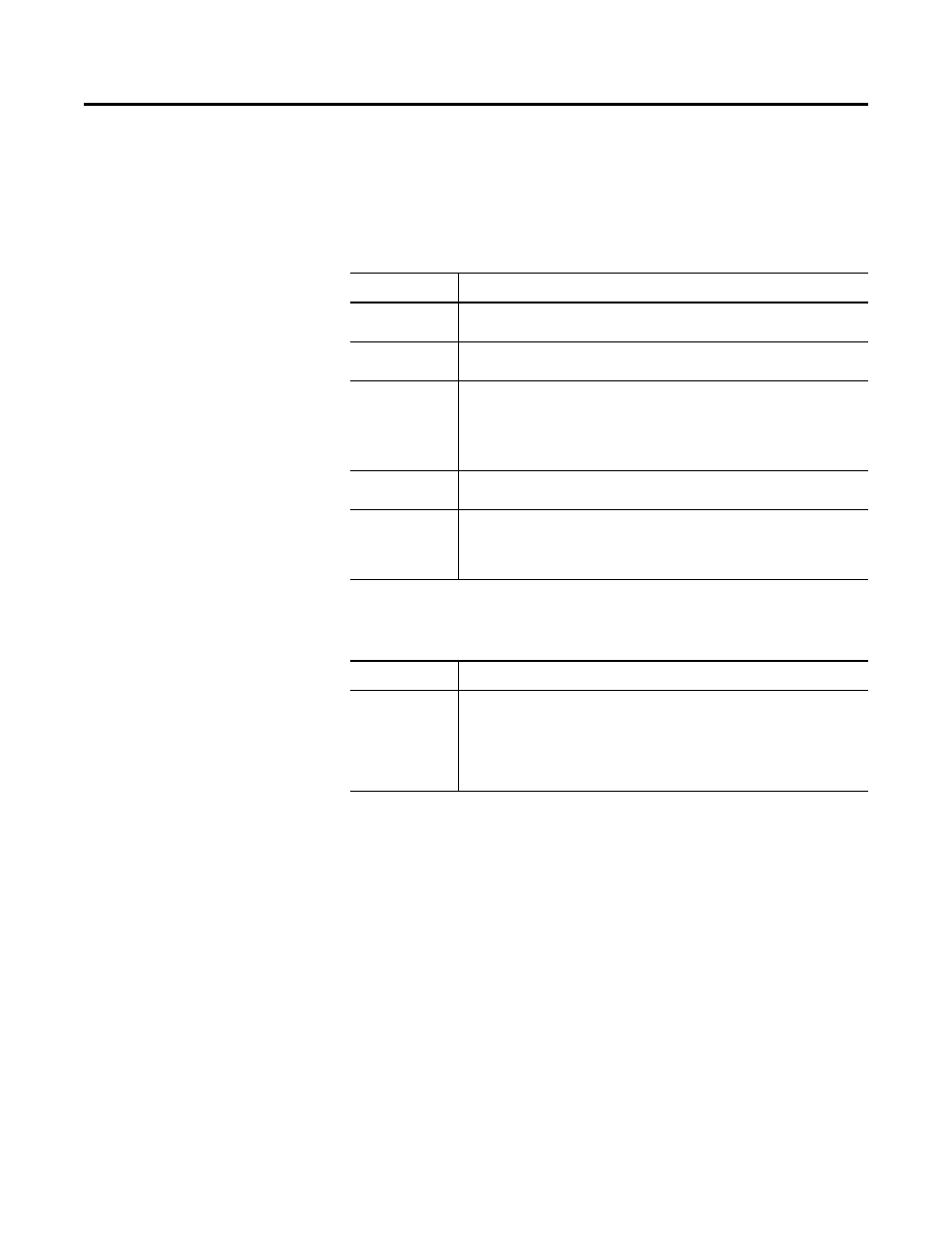
PID Reference and Feedback
Parameter 232 (PID Ref Sel) is used to enable the PID mode
(Parameter 232 ¦ 0 PID Disabled) and to select the source of the PID
Reference. If A132 (PID Ref Sel) is not set to 0 PID Disabled, PID
can still be disabled by select programmable digital input options
(Parameters 151…154) such as Jog, Local, or PID Disable.
Parameter 233 (PID Feedback Sel) is used to select the source of the
PID feedback.
PID Deadband
Parameter 238 (PID Deadband) is used to set a range, in percent, of
the PID Reference that the drive will ignore.
Example
•
(PID Deadband) is set to 5.0
•
The PID Reference is 25.0%
•
The PID Regulator will not act on a PID Error that falls between
20.0 and 30.0%
Option
Description
0
PID Disabled
Disables the PID loop (default setting)
1
PID Setpoint
Selects Exclusive Control. Parameter 137 (PID Setpoint) will be used to set the value of
the PID Reference
4
Comm Port
Selects Exclusive Control. The reference word from a communication network
DeviceNet
™
becomes the PID Reference. The value sent over the network is scaled
so that Parameter 135 (Maximum Freq) x 10 = 100% reference. For example, with
(Maximum Freq) = 60 Hz, a value of 600 sent over the network would represent 100%
reference.
5
Setpnt, Trim
Selects Trim Control. Parameter 137 (PID Setpoint) will be used to set the value of the
PID Reference.
8
Comm, Trim
Selects Trim Control. The reference word from a communication network DeviceNet
becomes the PID Reference. The value sent over the network is scaled so that
Parameter 135 (Maximum Freq) x 10 = 100% reference. For example, with (Maximum
Freq) = 60 Hz, a value of 600 sent over the network would represent 100% reference.
Option
Description
2
Comm Port
The Consumed Assembly (Instance 164 — Default Consumed Inverter Type Distributed
Motor Controller) from a communication network (see page C-9 for details on the
Consumed Assembly) which becomes the PID Feedback. The value sent over the
network is scaled so that Parameter 135 (Maximum Freq) x 10 = 100% Feedback. For
example, with (Maximum Freq) = 60 Hz, a value of 600 sent over the network would
represent 100% Feedback.