Rockwell Automation 284G ArmorStart - User Manual User Manual
Page 134
4-54
Bulletin 284G Programmable Parameters for Sensorless Vector Controllers
Parameters 240…247 are only active if 138 (Speed Reference) is set
to 6 Stp Logic.
These parameters can be used to create a custom profile of frequency
commands. Each step can be based on time, status of a Logic input, or
a combination of time and the status of a Logic input.
Digits 0…3 for each (Stp Logic x) parameter must be programmed
according to the desired profile.
A Logic input is established by setting a digital input, Parameters
151…154 (Digital Inx Sel), to 23 Logic In1 and/or 24 Logic In2.
A time interval between steps can be programmed using Parameters
250…257 (Stp Logic Time x). See Table 4.8 for related parameters.
The speed for any step is programmed using Parameters 170…177
(Preset Freq x).
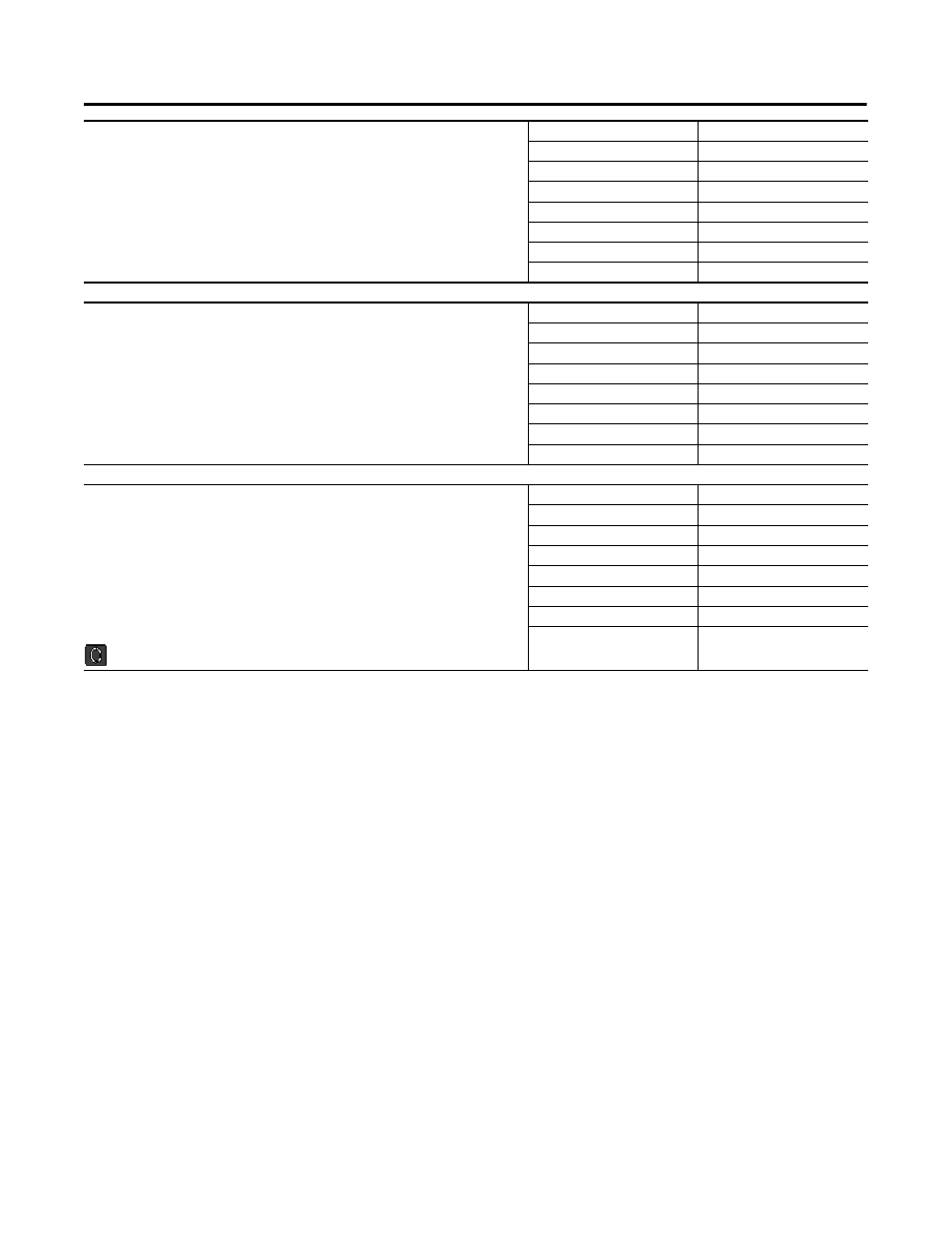
PID Deadband
Sets the lower limit of the PID output.
Parameter Number
238
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.1%
Minimum Value
0.0%
Maximum Value
10.0%
Default Value
0.0%
PID Preload
Sets the value used to preload the integral component on start or enable.
Parameter Number
239
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.0 Hz
Minimum Value
0.0 Hz
Maximum Value
400.0 Hz
Default Value
0.0 Hz
A240 (Stp Logic 0)
A241 (Stp Logic 1)
A242 (Stp Logic 2)
A243 (Stp Logic 3)
A244 (Stp Logic 4)
A245 (Stp Logic 5)
A246 (Stp Logic 6)
A247 (Stp Logic 7)
Parameter Number
240…247
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
—
Minimum Value
0001
Maximum Value
baFF
Default Value
00F1
Stop drive before changing this parameter.