Rockwell Automation 284G ArmorStart - User Manual User Manual
Page 136
4-56
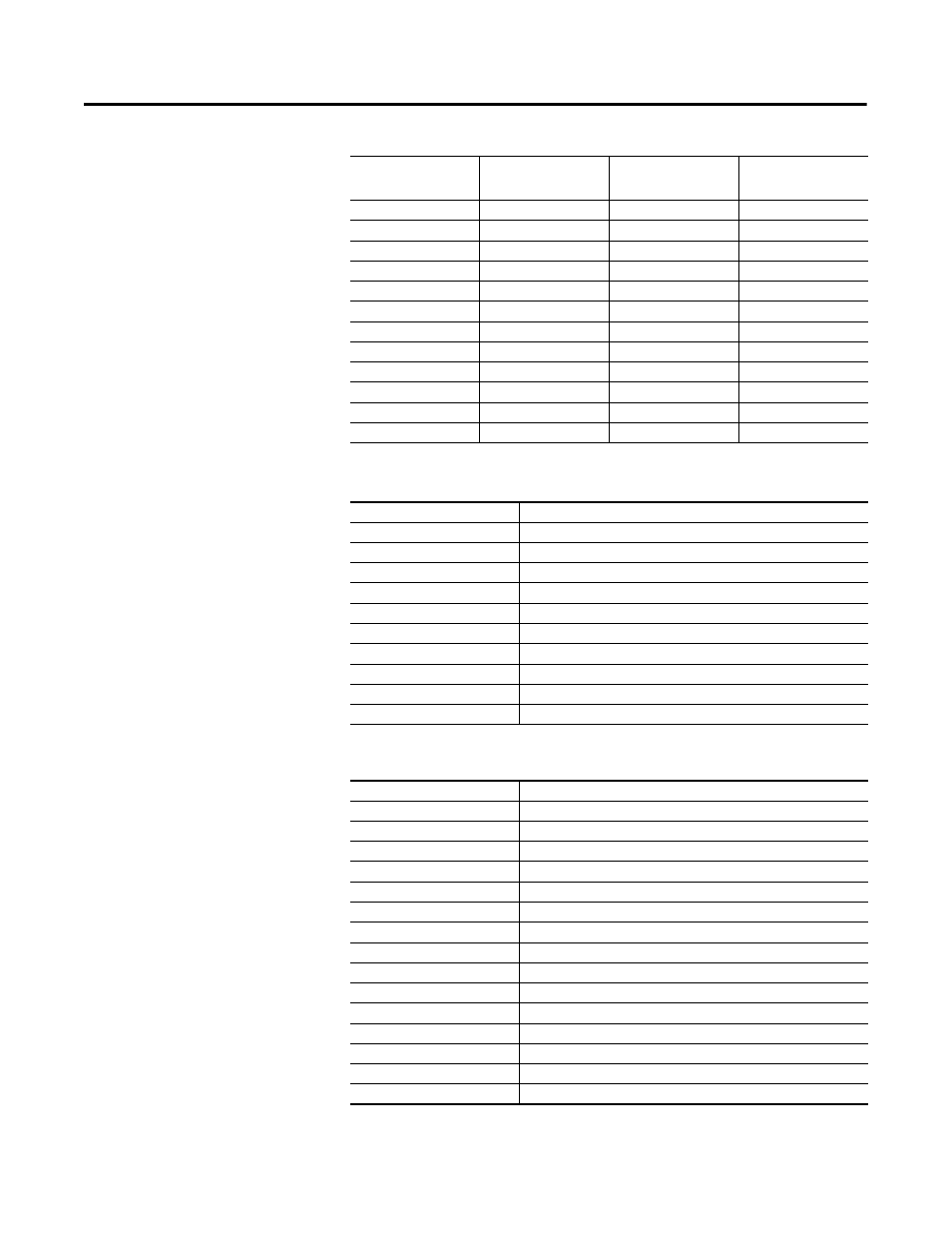
Bulletin 284G Programmable Parameters for Sensorless Vector Controllers
Table 4.9
Digit 3 Settings
Table 4.10 Digit 2 Settings
Table 4.11
Digit 1 and Digit 0 Settings
Required
Setting
Accel/Decel
Parameter Used
Step Logic
Output State
Commanded
Direction
0
Accel/Decel 1
Off
FWD
1
Accel/Decel 1
Off
REV
2
Accel/Decel 1
Off
No Output
3
Accel/Decel 1
On
FWD
4
Accel/Decel 1
On
REV
5
Accel/Decel 1
On
No Output
6
Accel/Decel 2
Off
FWD
7
Accel/Decel 2
Off
REV
8
Accel/Decel 2
Off
No Output
9
Accel/Decel 2
On
FWD
A
Accel/Decel 2
On
REV
b
Accel/Decel 2
On
No Output
0
Jump to Step 0
1
Jump to Step 1
2
Jump to Step 2
3
Jump to Step 3
4
Jump to Step 4
5
Jump to Step 5
6
Jump to Step 6
7
Jump to Step 7
8
End Program (Normal Stop)
9
End Program (Coast to Stop)
A
End Program and Fault (F2)
0
Skip Step (Jump Immediately)
1
Step Based on (Stp Logic Time x)
2
Step if Logic In1 is Active
3
Step if Logic In2 is Active
4
Step if Logic In1 is Not Active
5
Step if Logic In12 is Not Active
6
Stop if either Logic In1 and Logic In2 is Active
7
Stop if both Logic In1 and Logic In2 is Active
8
Stop if neither Logic In1 and Logic In2 is Active
9
Step if Logic In1 is Active and Logic In2 is Not Active
A
Step if Logic In2 is Active and Logic In1 is Not Active
b
Step after (Stp Logic Time x) and Logic In1 is Active
C
Step after (Stp Logic Time x) and Logic In2 is Active
d
Step after (Stp Logic Time x) and Logic In1 is Not Active
E
Step after (Stp Logic Time x) and Logic In2 is Not Active
F
Do Not Stop/Ignore Digit 2 Settings