Rockwell Automation 284G ArmorStart - User Manual User Manual
Page 125
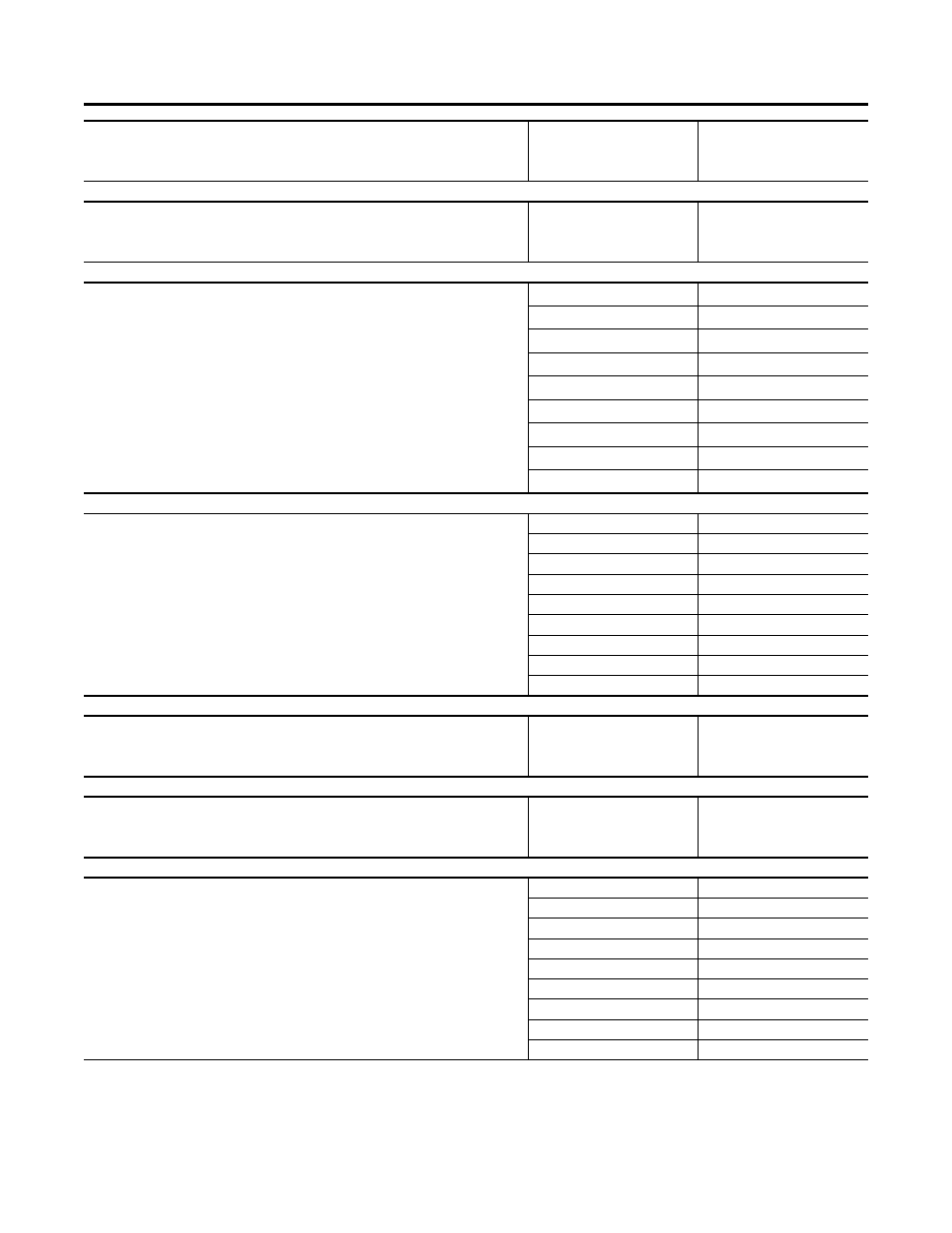
Bulletin 284G Programmable Parameters for Sensorless Vector Controllers
4-45
Comm Data Rate
This parameter is not available for use with the ArmorStart Distributed Motor
Controller.
Parameter Number
203
CommNode Addr
This parameter is not available for use with the ArmorStart Distributed Motor
Controller.
Parameter Number
204
Comm Loss Action
Selects the drive’s response to a loss of the communication connection or excessive
communication errors.
0 = Fault (Default)
Drive will fault on an F81 Comm Loss and coast to stop
1 = Coast Stop
Stops drive via coast to stop
2 = Stop
Stops via Parameter 137 (Stop Mode) setting
3 = Continu Last
Drive continues operating at communication commanded speed saved in RAM
Parameter Number
205
Related Parameters
115, 137, 206
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
—
Minimum Value
0
Maximum Value
3
Default Value
0
Comm Loss Time
Sets the time that the drive remain in communication loss before implanting the
option selected in Parameter 205 (Comm Loss Action).
Parameter Number
206
Related Parameters
115, 205
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.1 sec
Minimum Value
0.1 sec
Maximum Value
60.0 sec
Default Value
15.0 sec
Comm Format
This parameter is not available for use with the ArmorStart Distributed Motor
Controller.
Parameter Number
207
Language
This parameter is not available for use with the ArmorStart Distributed Motor
Controller.
Parameter Number
208
Anlg Out Setpnt
When parameter 165 (Analog Out Sel) is set to option 18, this sets the percentage of
the analog output desired
Parameter Number
209
Related Parameter
165
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
0.1%
Minimum Value
0.0%
Maximum Value
100.0%
Default Value
0.0%