IAI America ISPDACR-ESD User Manual
Page 80
72
12. Motor Replacement Procedures
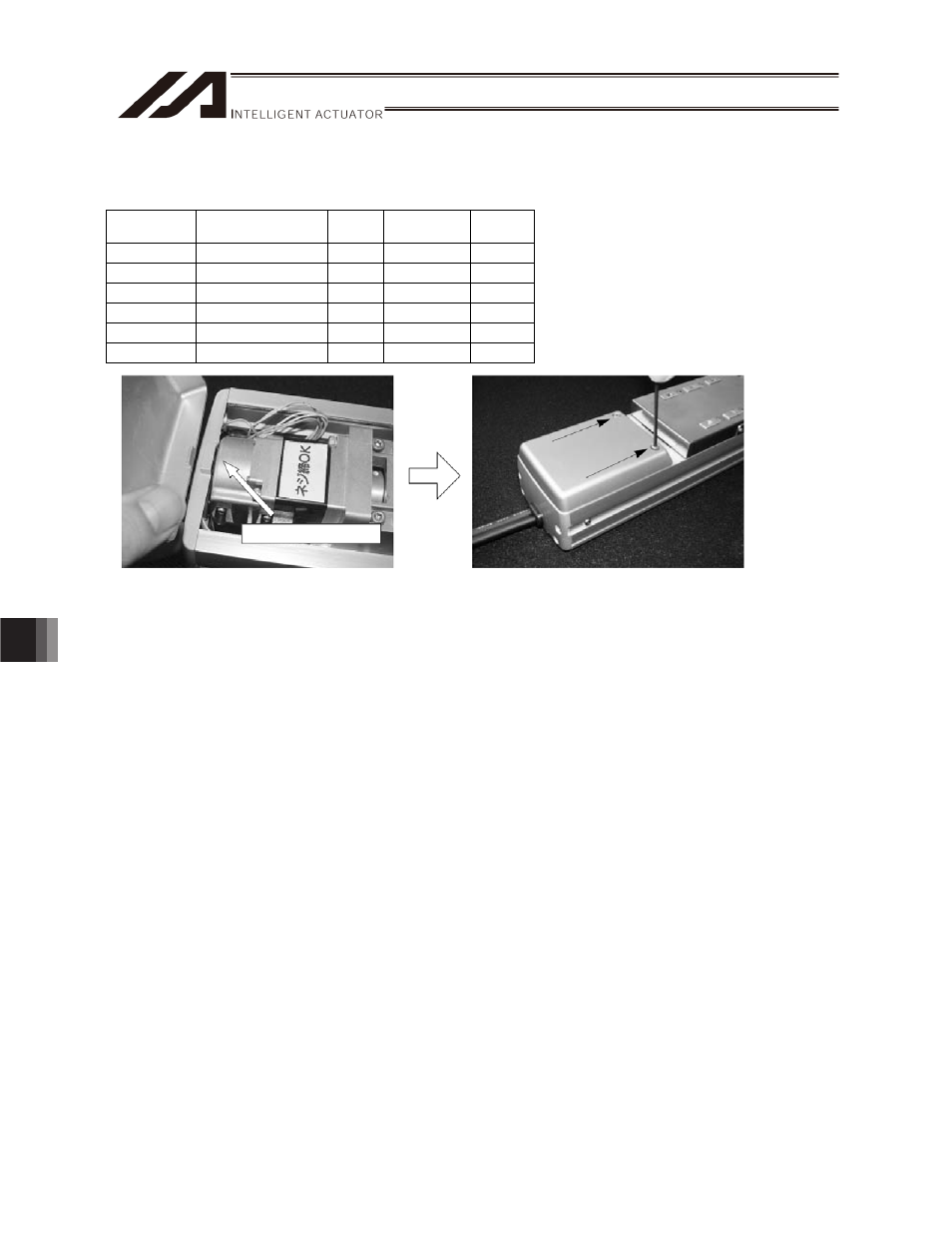
(13) Installing the motor cover
Affix the motor cover using two bolts.
N-cm {kgm-cm}
Type Nominal
diameter
Length
(mm)
Torque Quantity
ISDA-S
M4 12
114
{11.7}
2
ISDA-M
M5 20
222
{22.7}
2
ISDA-L
M5 25
222
{22.7}
2
ISDACR-S
M4 12
137
{14.0}
2
ISDACR-M
M5 20
267
{27.2}
2
ISDACR-L
M5 25
267
{27.2}
2
(14) Correcting for position deviation
[1] Connect the motor cable and encoder cable and turn on the controller power.
Use the PC software or teaching pendant to perform homing and check the home position.
Repeat homing several times to confirm that the actuator returns to the same position.
[2] Check the amount of position deviation.
The position may have changed slightly from where it was before the motor was replaced.
Accordingly, select a desired position number that allows you to check the amount of deviation
before and after the replacement, and then perform positioning to that position and measure the
amount of deviation.
[3] In the case of a X-SEL or SSEL controller, reflect the amount of deviation in the parameter for
home preset. In the case of a SCON controller, reflect it in the parameter for home return offset.
[For the methods to set these parameters, refer to 12.3, “How to Set the Home Preset and Home
Return Offset.”]
* If the two positions differ significantly (one ball screw revolution or more = lead or more) or if
the actuator does not return to the same position when homing is repeated, install the motor
again by following the procedure described in this manual.
The distance from the reference surface may have been set wrongly when the slider position
was aligned.
(15) Checking the operation after replacing the motor
After the motor has been replaced, operate the actuator continuously to confirm absence of vibration
or abnormal noises.
Hook on the tab.