Fast rtk output mode – Spectra Precision ProMark 800 Reference Manual User Manual
Page 100
88
RTK Implementation
interference in the data link between the base and the rover.
Regardless of the cause, the rover will only provide an RTK
position when it receives data from the base.
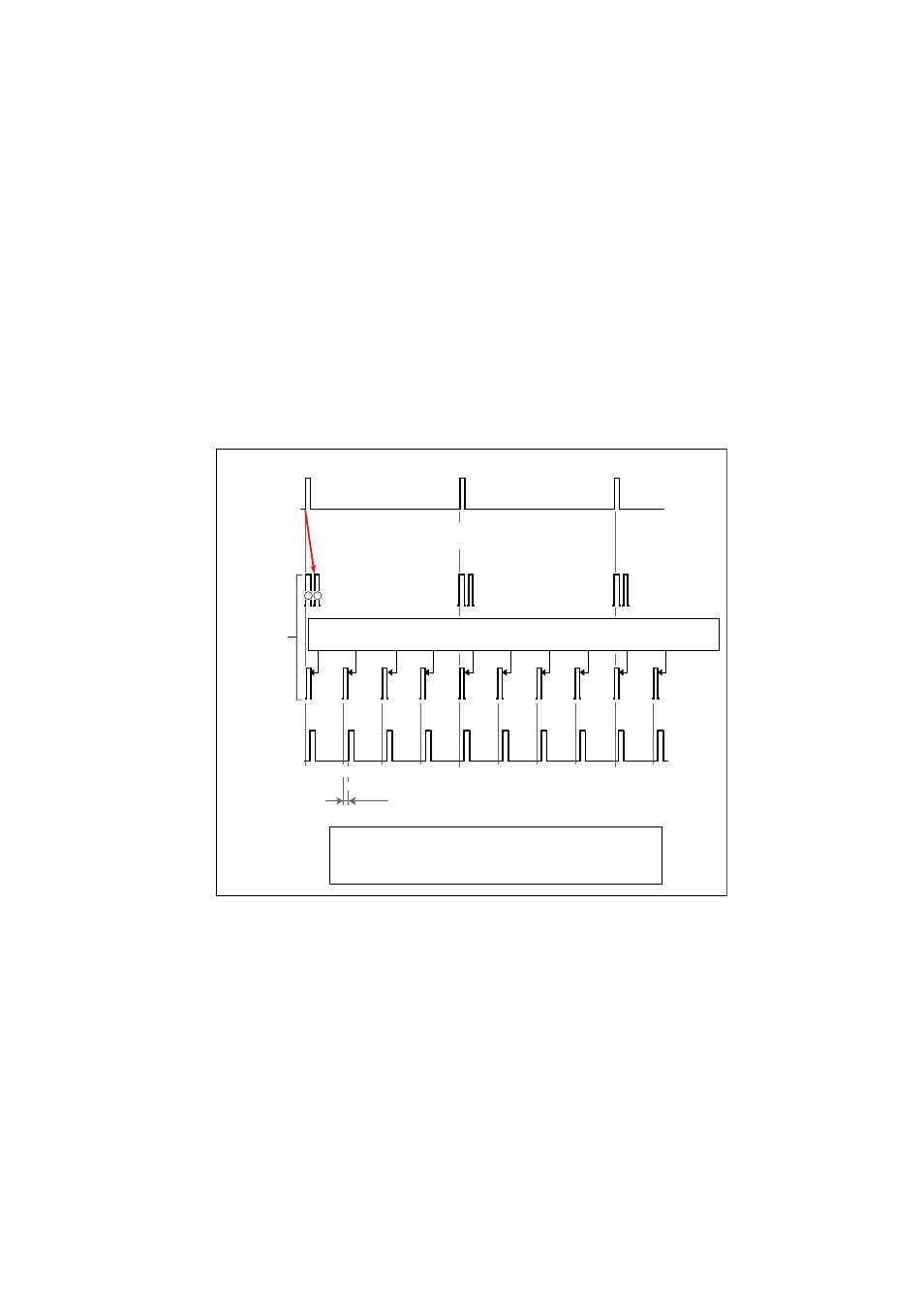
Fast RTK Output Mode
Principle. In Fast RTK, the rover uses the RTK correction data
from a single epoch to compute multiple RTK positions.
For example, if the base is transmitting RTK correction data
every second (1 Hz), the rover can output four RTK positions
at intervals of 0.25 second.
The time when position is requested is t0 and the time when
the rover starts providing the position for time t0 is t1. Times
t0a, t0e and t0j in the base and the rover are synchronous
because they originate from the same clock which is the
GNSS time.
Here the latency (t1 – t0) is caused by the extrapolation and
position processing times in the sole rover. In this
Epoch1
Epoch2
Epoch3
RTK
Correction
Data (Base)
RTK Position
Output
(Rover)
Internal
Processes
in Rover
Latency
Rover positions at times t0.. are delivered at times t1..
t0..: Position request times
t1..: Position delivery times
2. RTK correction data computed at t0.. arrives in rover
1. Rover saves GNSS raw data received at t0..
Pos1
Pos2
Pos3
Pos4
Pos5
Pos6
Pos7
Pos8
Pos9
Pos10
t0a
t0b
t1b
t0c
t0d
t0e
t0f
t0g
t0h
t0i
t0j
3. Rover extrapolates last RTK correction data received for time t0(x-1).. and computes
estimated RTK position at time t0.. from raw data and extrapolated correction data
2
1